Tuned Dynamic Vibration Absorber
A vibration absorber is a mechanical device which is tuned to reduce or eliminate undesired vibrations, it must shift the natural frequencies, away from the excitation frequency, as shown in Fig. 1.
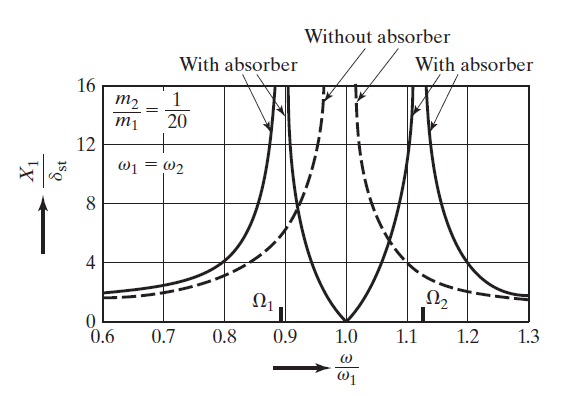
Fig. 1 Comparing response of system, with and without absorber
An additional spring mass system is attached to the main spring mass system, so that the resonance of the original system will not occur. The addition of spring mass system results in a two degree of freedom system, having two natural frequencies. General applications include reciprocating tools such as saws, drills, rotary hammers which requires to balance the reciprocating force. Fig. 2 shows a schematic representation of an undamped dynamic vibration absorber.
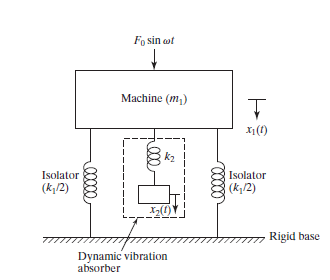
Fig. 2 Undamped dynamic vibration absorber.
Mathematically, a mass m2 attached to a machine of mass m1, through a stiffness of k2, will be
m1x¨1+k1x1+k2(x1−x2)=F0sinωt
m2x¨2+k2(x2−x1)=0
By assuming harmonic solution,
xj(t)=Xjsinωt,j=1,2
The steady state amplitudes are,
X1=(k1+k2−m1ω2)(k2−m2ω2)−k22(k2−m2ω2)F0
X2=(k1+k2−m1ω2)(k2−m2ω2)−k22k2F0
To reduce amplitude of m1, X1 is substituted as zero, leading to
ω2=m2k2
The absorber is designed such that the amplitude of vibration of the machine, while operating at its original resonant frequency, will be zero.
By defining,
δst=k1F0
and the natural frequency of m
1 and m
2 as ω
1 and ω
2 ,
ω1=(m1k1)1/2
ω2=(m2k2)1/2
The steady state amplitudes can be written as,
δstX1=[1+k1k2−(ω1ω)2][1−(ω2ω)2]−k1k21−(ω2ω)2
δstX2=[1+k1k2−(ω1ω)2][1−(ω2ω)2]−k1k21
At ω=ω1 substituting X1=0, which gives,
X2=−k2k1δst=−k2F0
This shows that the force exerted by the auxiliary spring is opposite to the impressed force, neutralizing it, thus reducing X1 to zero.
