
Simulation of Control Systems 
1. The steady state error for a unit step input is ________
2. A control system yielded a steady state error of 0.20 for unit step input. A unit integrator is cascaded to this system and unit ramp input is applied to this modified system. What is the value of steady-state error for this modified system ?
3. Feedback control system is basically ______________
4. Consider that the loop transfer function (for a minimum phase system) of a closed-loop system is
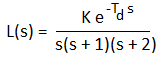
Assume K = 1, Td = 0 and find the gain crossover frequency
Assume K = 1, Td = 0 and find the gain crossover frequency
5. Consider that the loop transfer function (for a minimum phase system) of a closed-loop system is
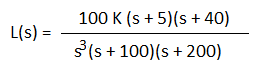
Assume K =1 and find the gain crossover frequency
Assume K =1 and find the gain crossover frequency
6. A system has poles at 0.01 Hz, 1 Hz and 80 Hz, zeroes at 5 Hz, 100 Hz and 200 Hz. The approximate phase of the system response at 20 Hz is
7. Consider the system represented by the expression given below.
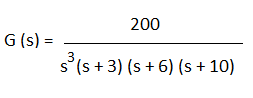
What would be the total phase value at ω = 0?
What would be the total phase value at ω = 0?
8. Due to an addition of pole at origin, the polar plot gets shifted by ___ at ω = 0 ?
9. For a closed-loop system with loop transfer function L(s) that is of minimum-phase type, the system is closed-loop stable if the L(s) plot that corresponds to the Nyquist path does not enclose the _____ point.
10. Consider a feedback system (minimum phase system) with gain margin of about 30. At what point does Nyquist plot crosses negative real axis?