
Signal representation and orthogonality
Vectors and dot products
To understand orthogonality of signals, we recall the familiar notion of vectors in 3D space and their representation. If , , and denote the unit vectors along the three perpendicular axes of the reference coordinate system, any arbitrary vector can be represented as
In the Cartesian coordinate system, the unit vectors and correspond to the points (1,0,0), (0,1,0), and (0,0,1) respectively. The dot product of any two vectors and is defined as
By this definition, we can see that any two vectors from the set have zero dot product. In general, any two perpendicular vectors will have zero dot product and are said to be orthogonal to each other. Additionally, when orthogonal unit vectors are used as basis to represent vectors, the coefficients can be easily found. For example, when are used as basis,
Dot product of signals and orthogonality
In an analogous way, we can define the notion of dot product (and hence orthogonality) for signals. Signals can be thought of as vectors with infinite dimension. For continuous-time signals and , their dot product is defined as
Two signals and are said to be orthogonal if their dot product, as defined above, is zero, i.e., . In other words, the product signal has equal amount of positive and negative area.
For periodic signals and with same period T, their orthogonality can be verified by computing the integral of the product within a single period T. Thus, periodic signals and with period T are orthogonal if
As an example, consider the signals and . We can verify that their dot product is zero as seen by the product signal and the shaded areas in Fig.1 and Fig.2 respectively.
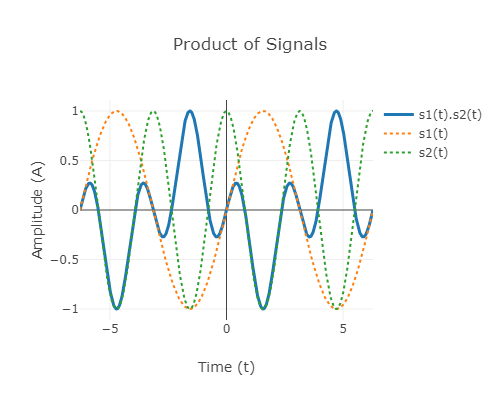
Fig.1: Product of sine and cosine signals
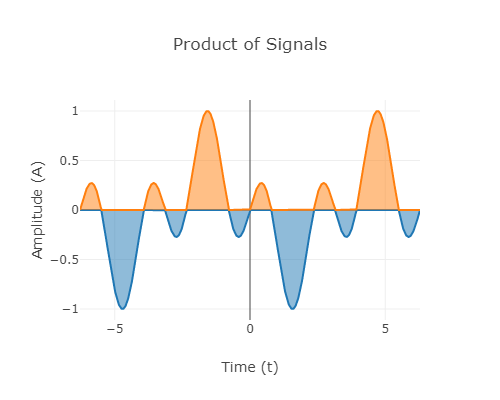
Fig.2: Area getting cancelled due to the product of signals
The notion of dot product and orthogonality can be extended to complex signals. If and are complex-valued signals, their dot product is defined as
Error in LaTeX ' \langle\mathbf{x}_1 (t),\mathbf{x}\_2 (t)\rangle ~= \int_{t=-\infty}^{t=\infty} \mathbf{x}\_1^{\*}(t) \mathbf{x}\_2 (t) dt ': KaTeX parse error: Undefined control sequence: \* at position 97: …\mathbf{x}\_1^{\̲*̲}(t) \mathbf{x}…
where Error in LaTeX ' \mathbf{x}\_1^{\*}(t) ': KaTeX parse error: Undefined control sequence: \* at position 17: …\mathbf{x}\_1^{\̲*̲}(t) denotes complex conjugate of . For example, the signals and are orthogonal signals.
Discrete-time signals
In a similar fashion, for discrete-time signals, dot product can be defined as
For finite -length signals, dot product is defined as
Fourier Series
As in vectors, orthogonal signals are extensively used in representation of signals. They often form the building blocks for various signal representations. For example, in trigonometric Fourier series analysis, a periodic signal is represented using sinusoids as follows:
where is the period of . The set of signals are the building blocks in Fourier series representation of periodic signals, where denotes the constant signal. All the signals in this set have the common period of . We can verify that any two signals in this set are orthogonal.
Haar Wavelet
Orthogonality is a recurring feature of many other signal representations, for example wavelet decomposition. In wavelet theory, a mother wavelet function is used to generate the building blocks by performing scaling and translation of this function. The set of functions (wavelets) thus generated form a pairwise orthogonal set of signals. These building blocks can be used to represent almost any arbitrary signal with finite support.
As an example, consider the Haar mother wavelet and its scaled and translated version with scale factor and shift given by,
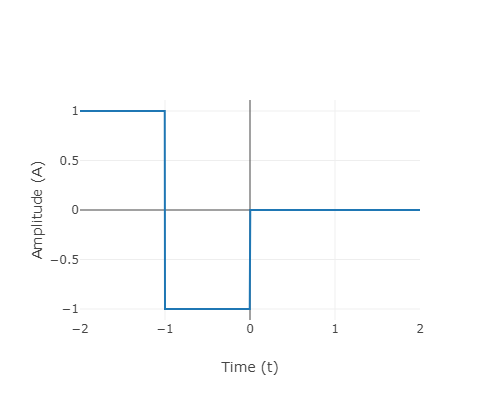
Fig.3: Haar mother wavelet
We can verify that the scaled and shift versions of the Haar wavelet are orthogonal to each other. As a special case, orthogonality of the wavelets and can be seen below.
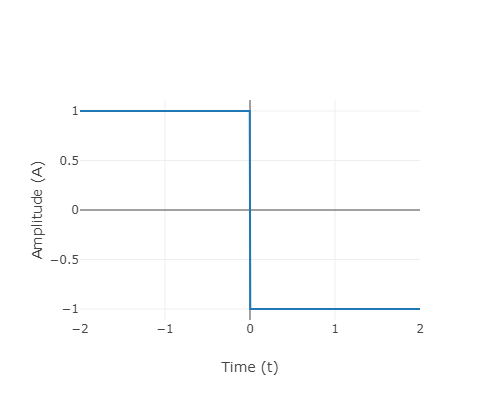
Fig.4: Orthogonality of scaled Haar wavelet
Advantages of orthogonality
Finding the representation coefficients becomes easy when a signal is decomposed into a set of orthogonal signals. Consider the trigonometric Fourier series representation given above. We can find the coefficients by computing the dot product of the given periodic signal with the signal associated with each of these components. Thus,
Coefficients for other signal representations can be obtained in a similar way.