
Forced vibration of SDOF system
When an applied force causes the system to vibrate it is considered as a case of forced vibration. An external excitation is often reduced to one of the following types:
![]()
![]() where
where ![]() is the motion of the base
is the motion of the base
![]() where m0 is the imbalance mass e is the eccentricity of imbalance mass and ω is the angular velocity(rad/s) of rotation
where m0 is the imbalance mass e is the eccentricity of imbalance mass and ω is the angular velocity(rad/s) of rotation
Solution of the System
The solution of the forced vibration system consists of a steady state part and a transient part. The steady state response is independent of the initial conditions. The transient part comes to zero with time and is usually neglected. The steady state response is of the form
![]() where X0 is the amplitude and φ is the phase of steady state vibration. For
where X0 is the amplitude and φ is the phase of steady state vibration. For ![]() external harmonic excitation the steady state parameters are given by
external harmonic excitation the steady state parameters are given by
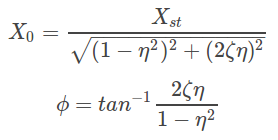
where ![]() is the deflection due to static force F0 and η = ω/ωn is the ratio of operating frequency to the natural frequency of the system.
is the deflection due to static force F0 and η = ω/ωn is the ratio of operating frequency to the natural frequency of the system.