Tools
Performance Tool
Validation Tool
Aim
Theory
Pretest
Procedure
Simulation
Posttest
References
Feedback
Aim
Theory
Pretest
Procedure
Simulation
Posttest
References
Feedback
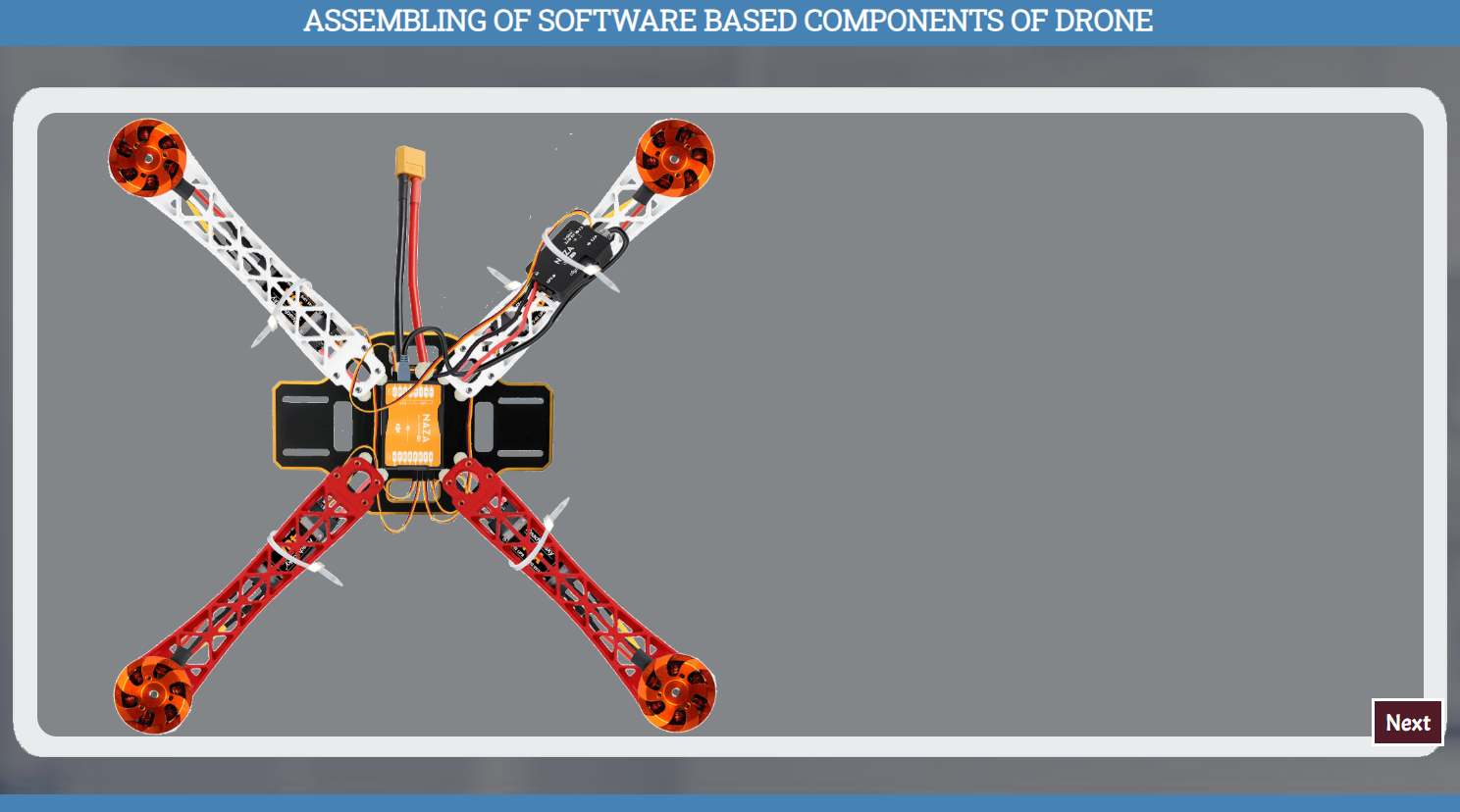
Assembling of Software-Based Components of a Drone
Procedure
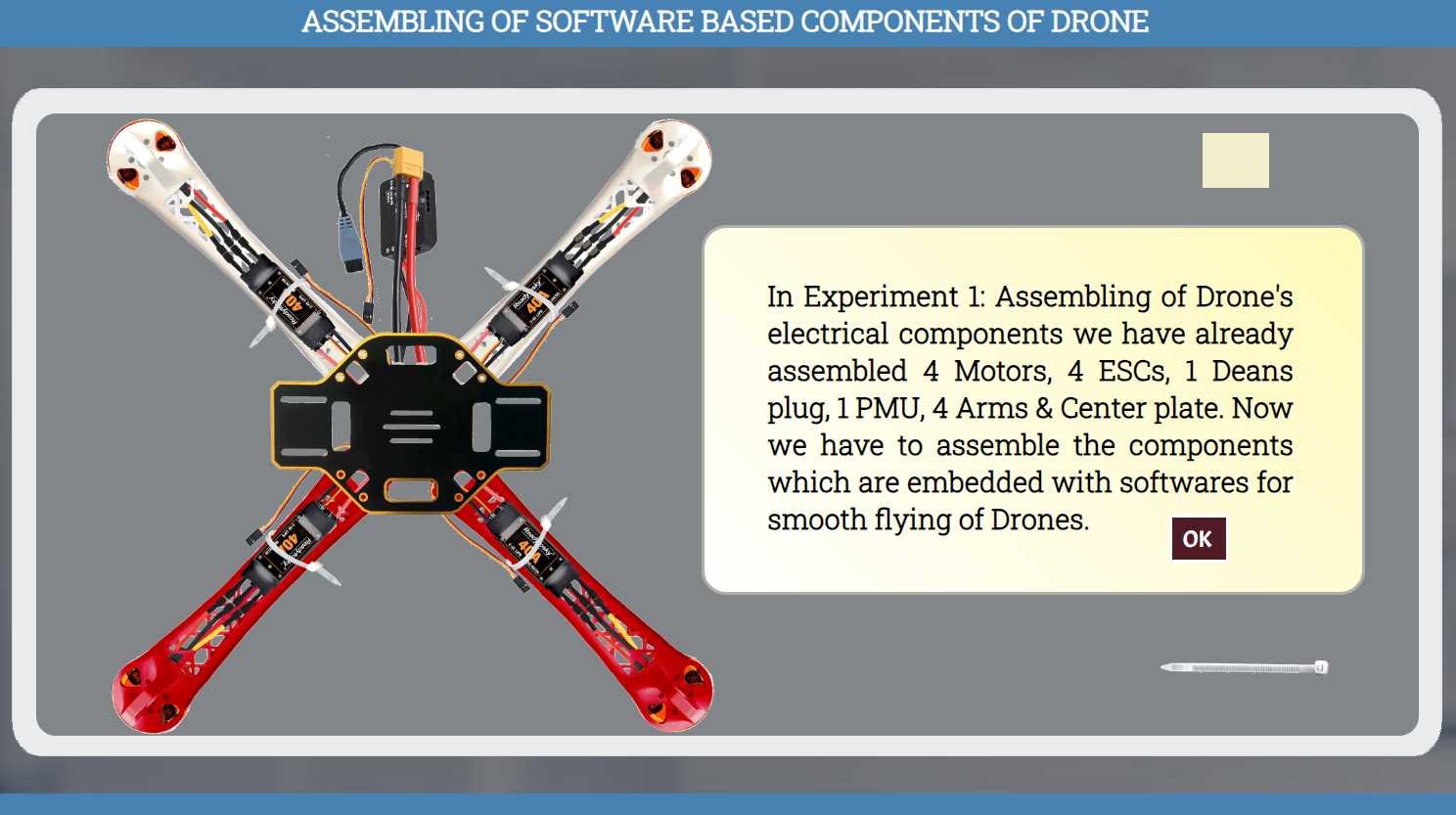
Assembling of Drone's Sofware Based Components
Click Here to Enter the Lab
click the next button
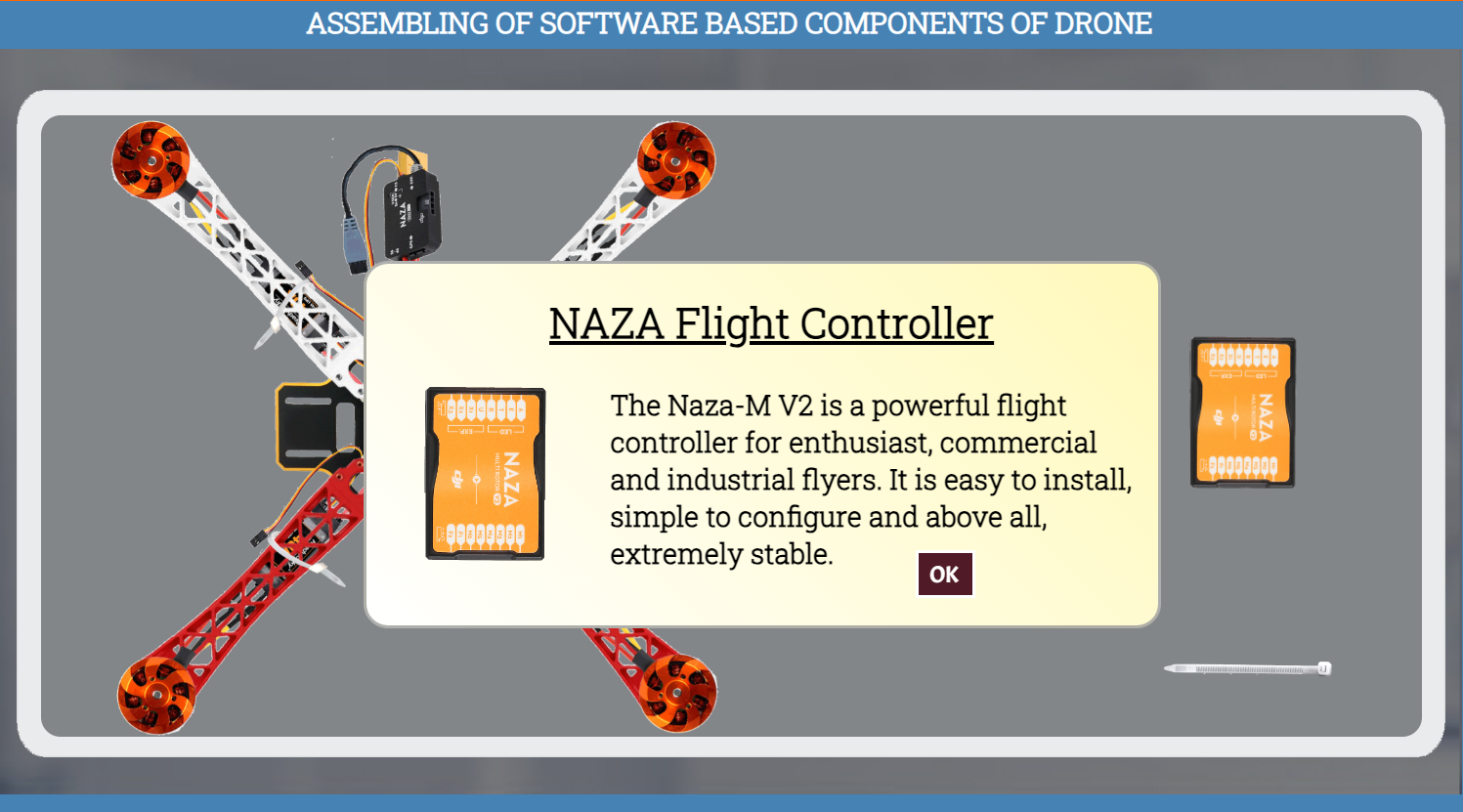
click the ok button
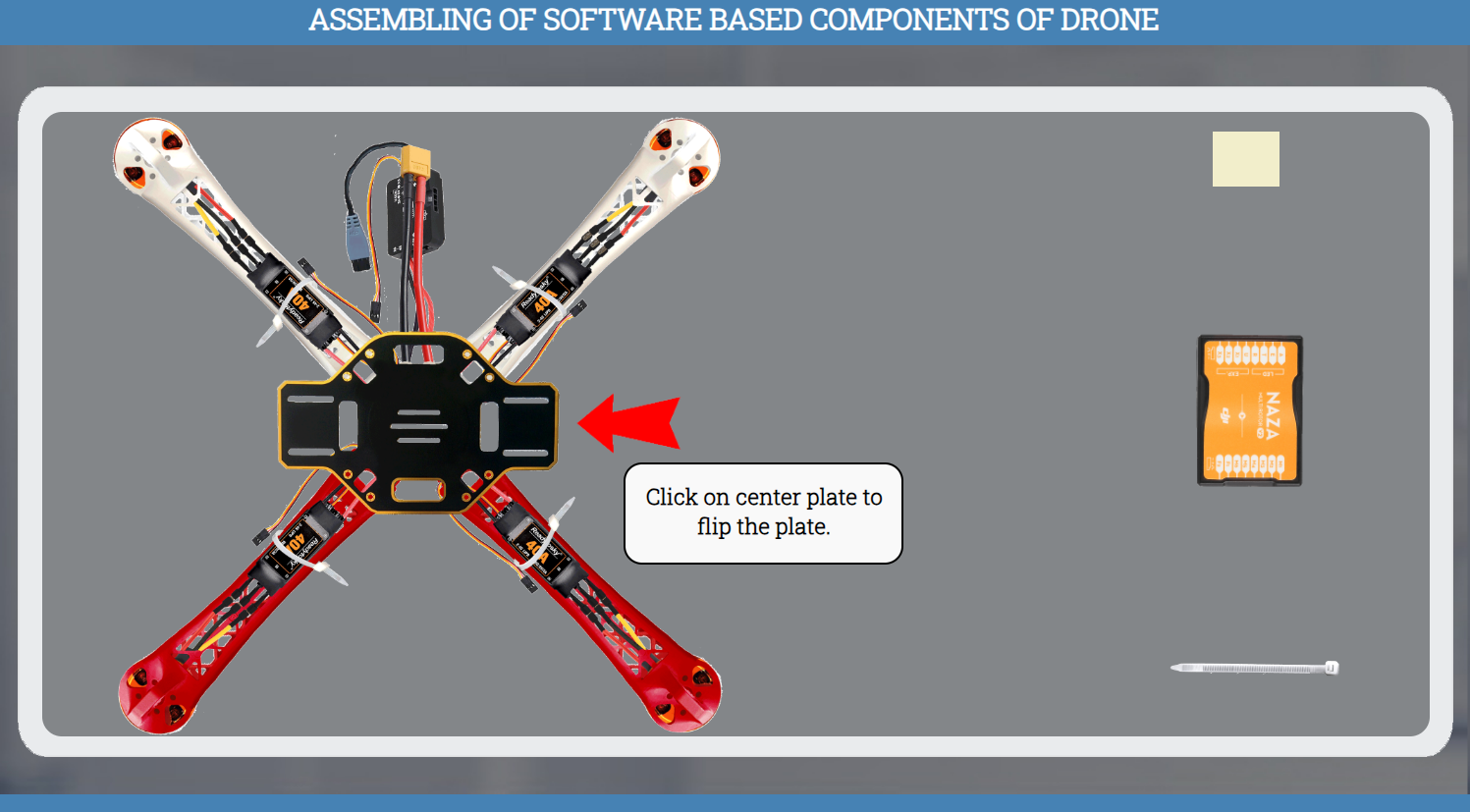
click on center plate to flip the plate
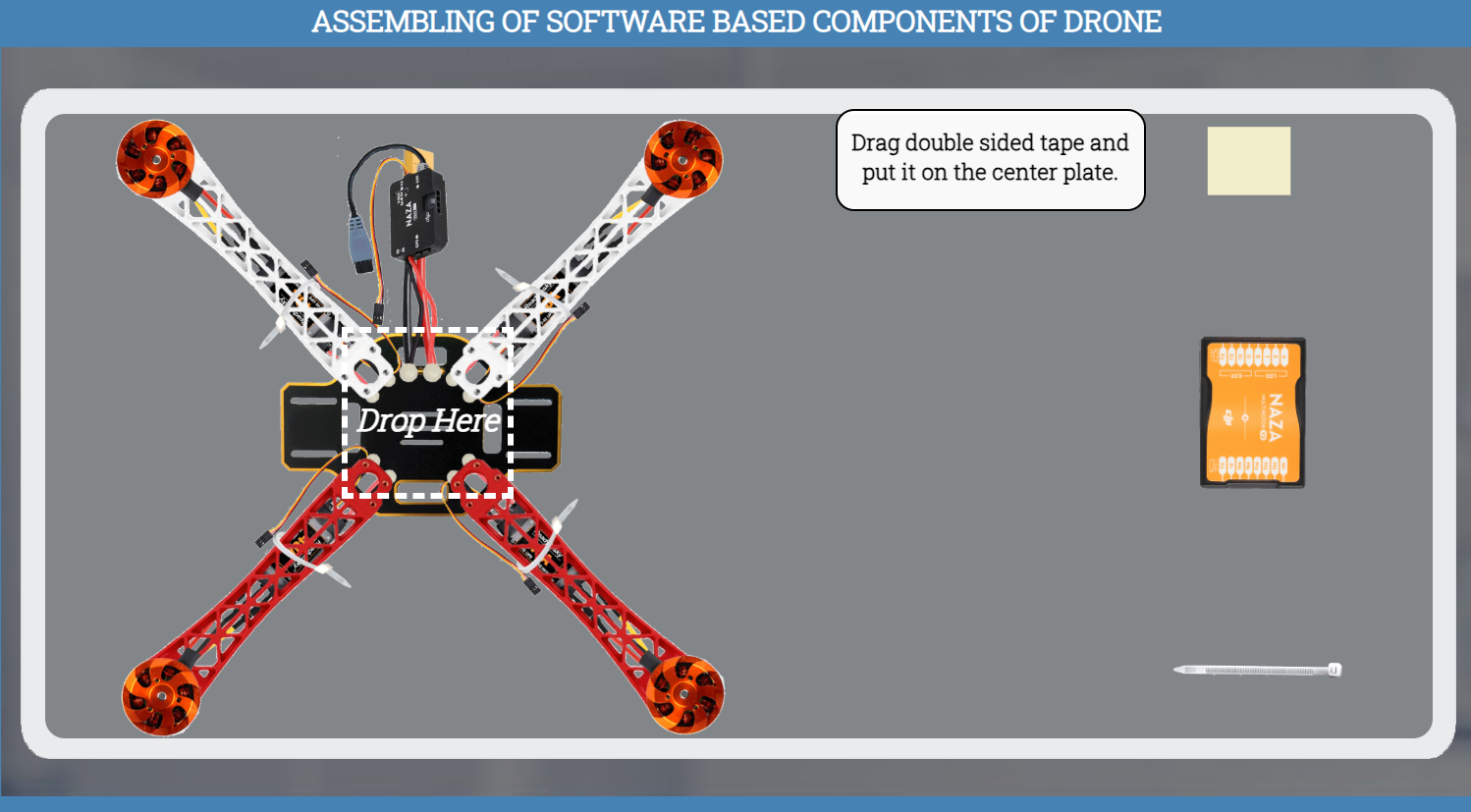
Drag double sided tape and put it on the center plate.
click the ok button
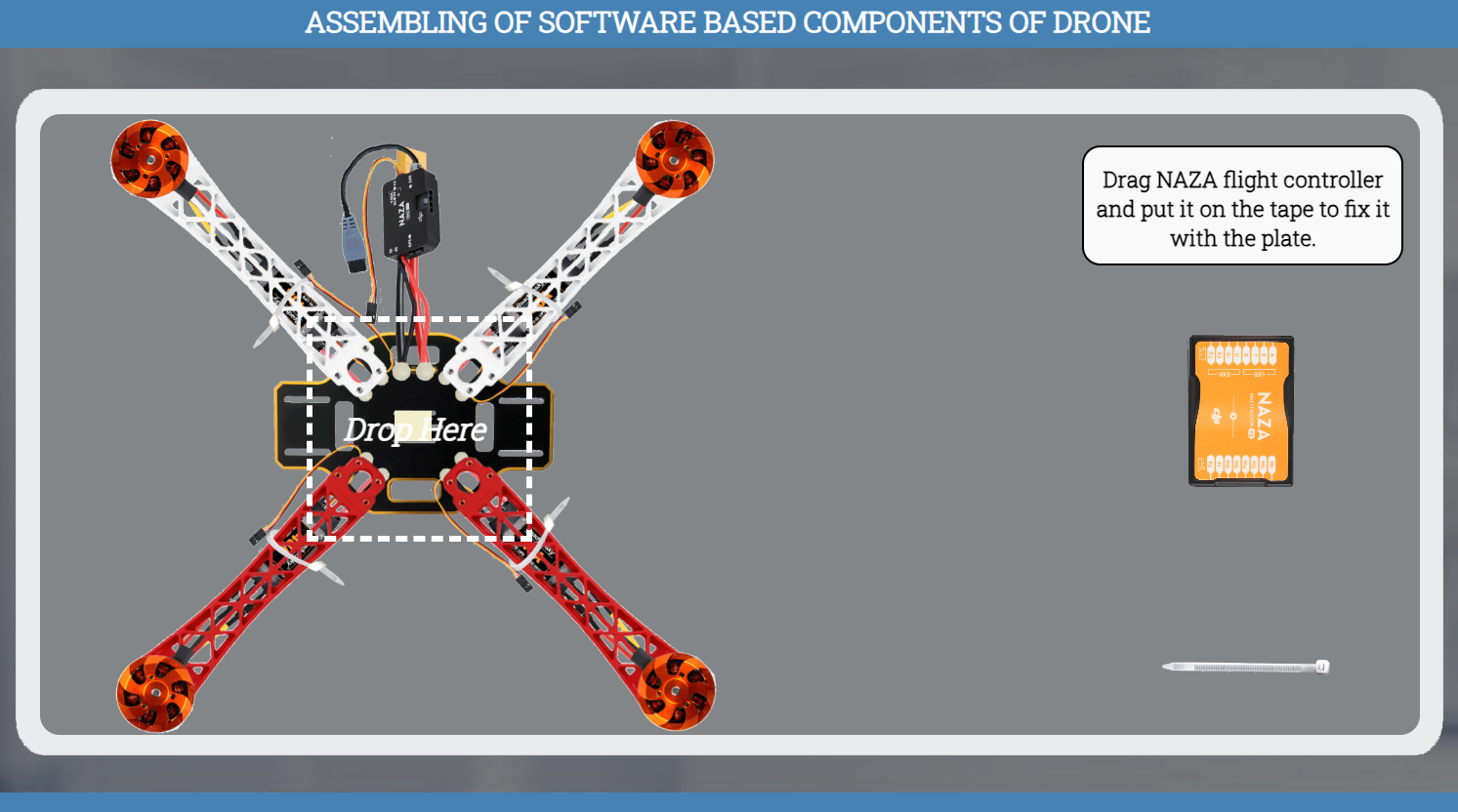
Drag NAZA flight controller and put it on the tape to fix it with the plate.
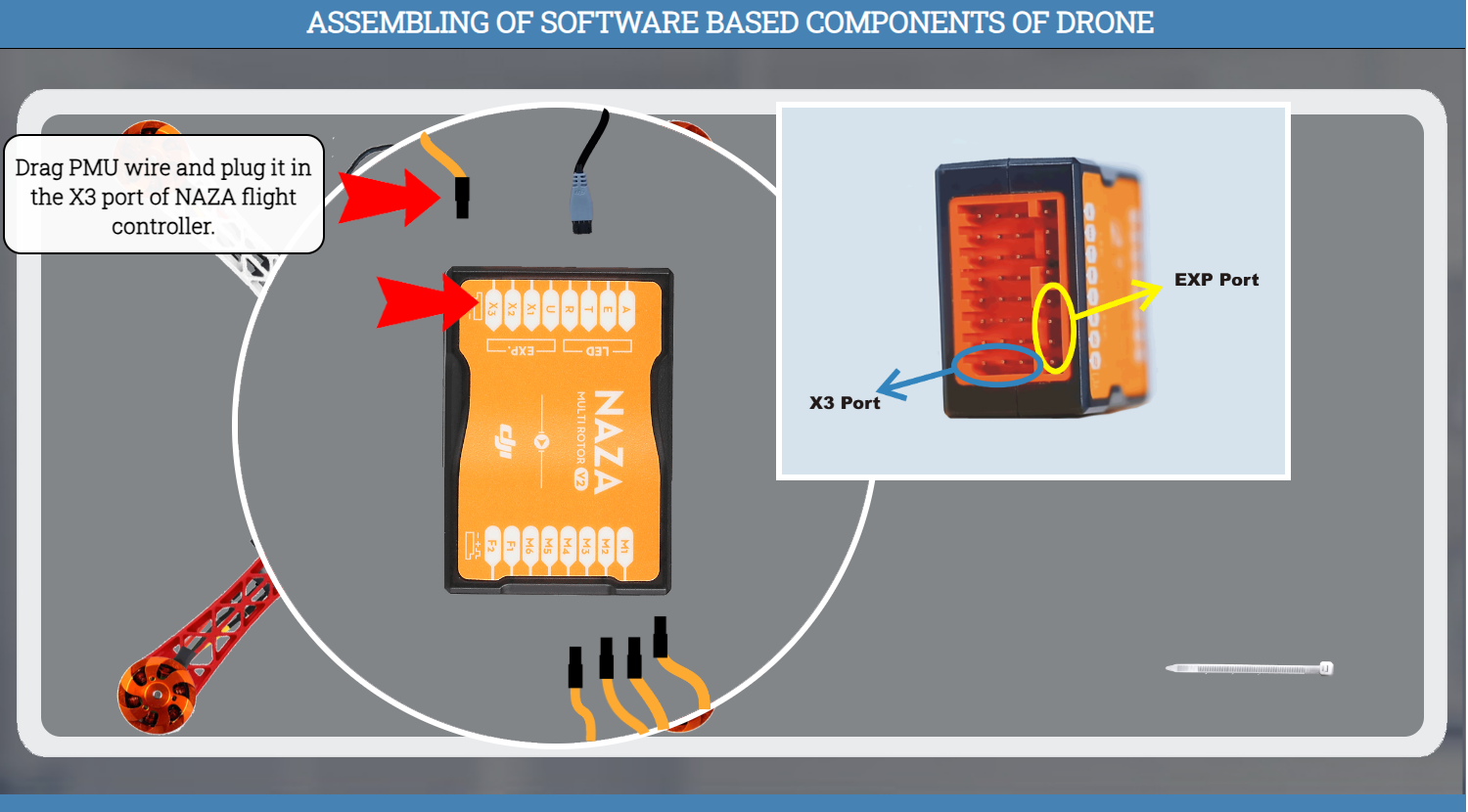
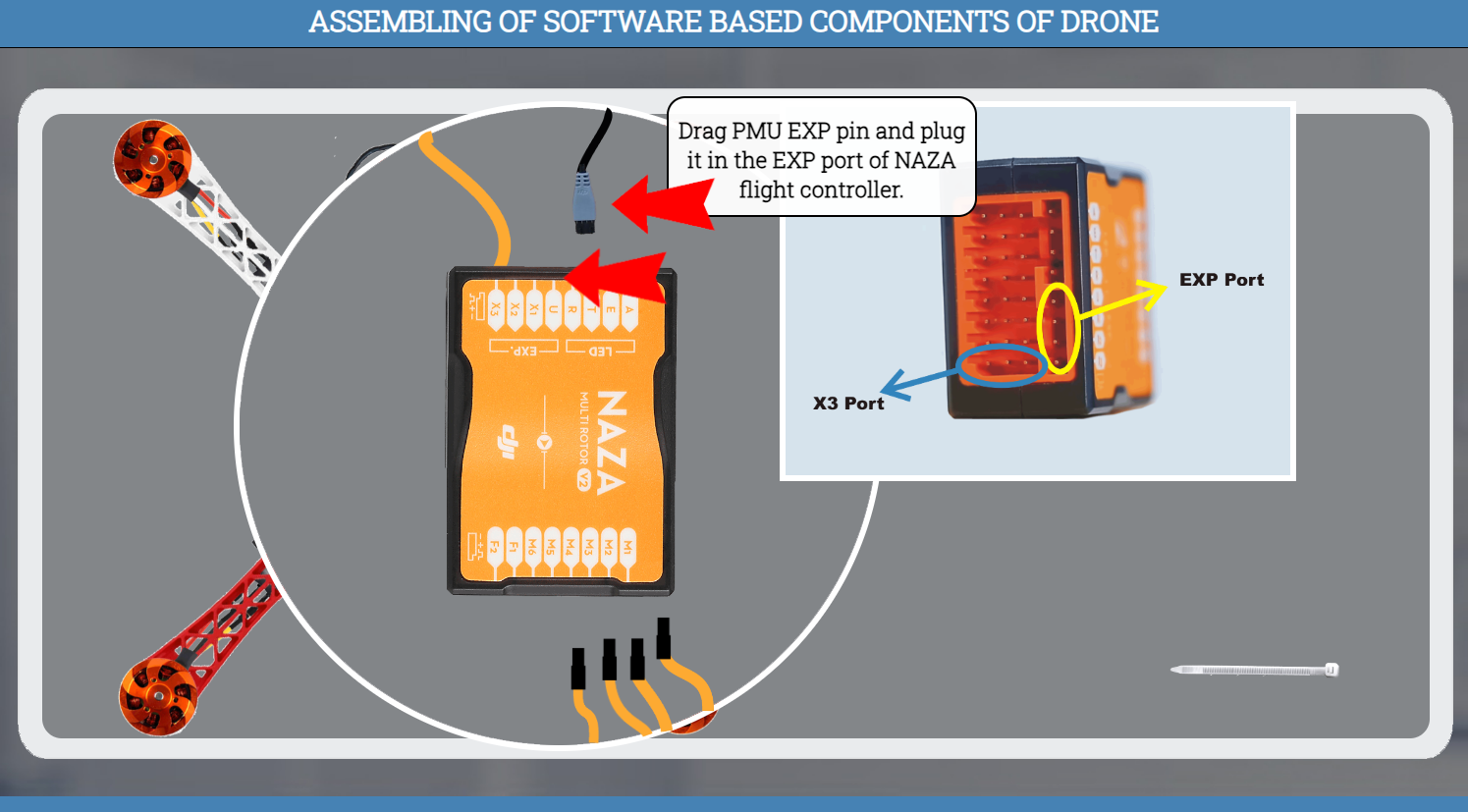
Drag PMU wire and plug it in the X3 port of NAZA flight controller.
Drag PMU EXP pin and plug it in the EXP port of NAZA flight controller.
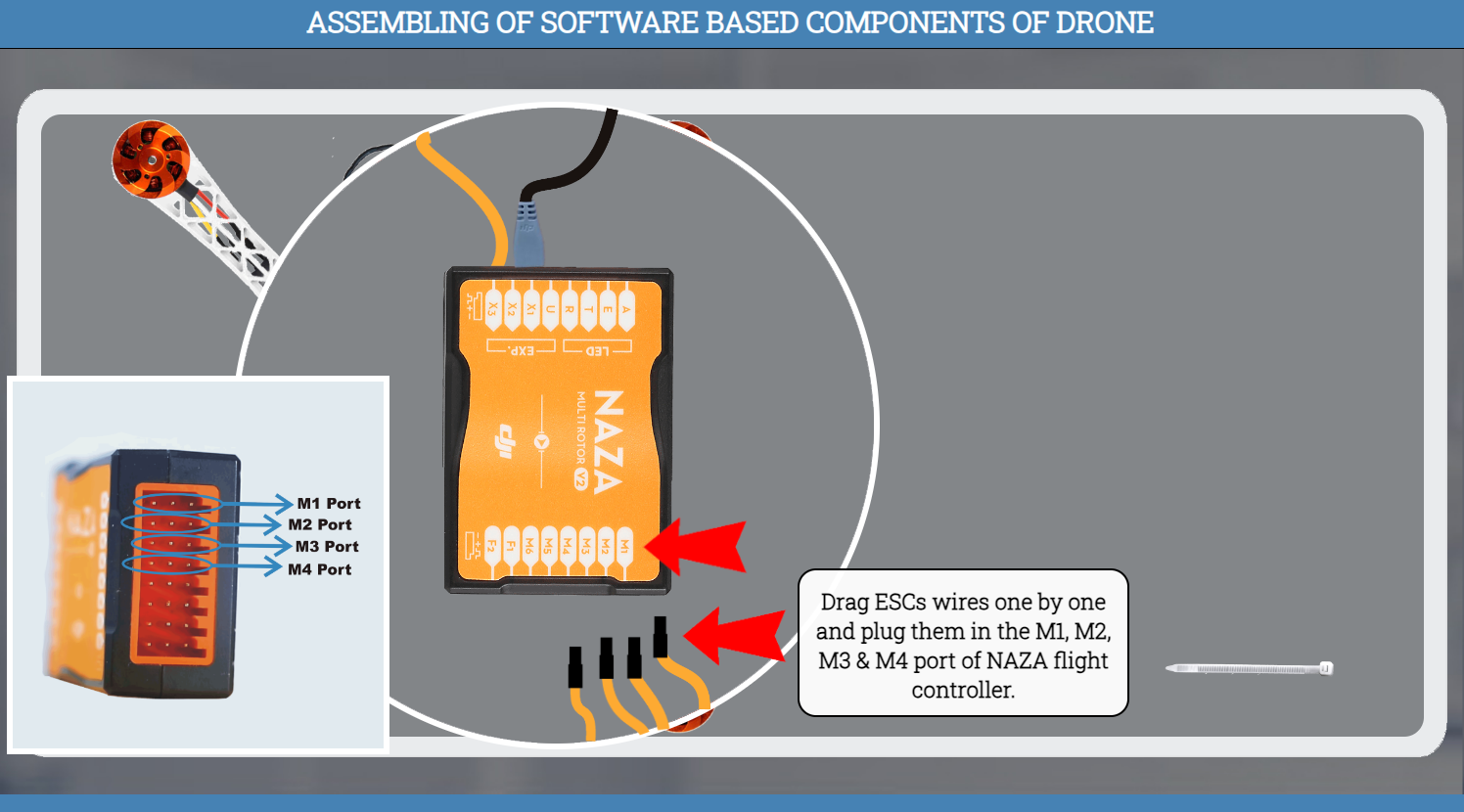
Drag ESCs wires one by one and plug them in the M1, M2, M3 & M4 port of NAZA flight controller.
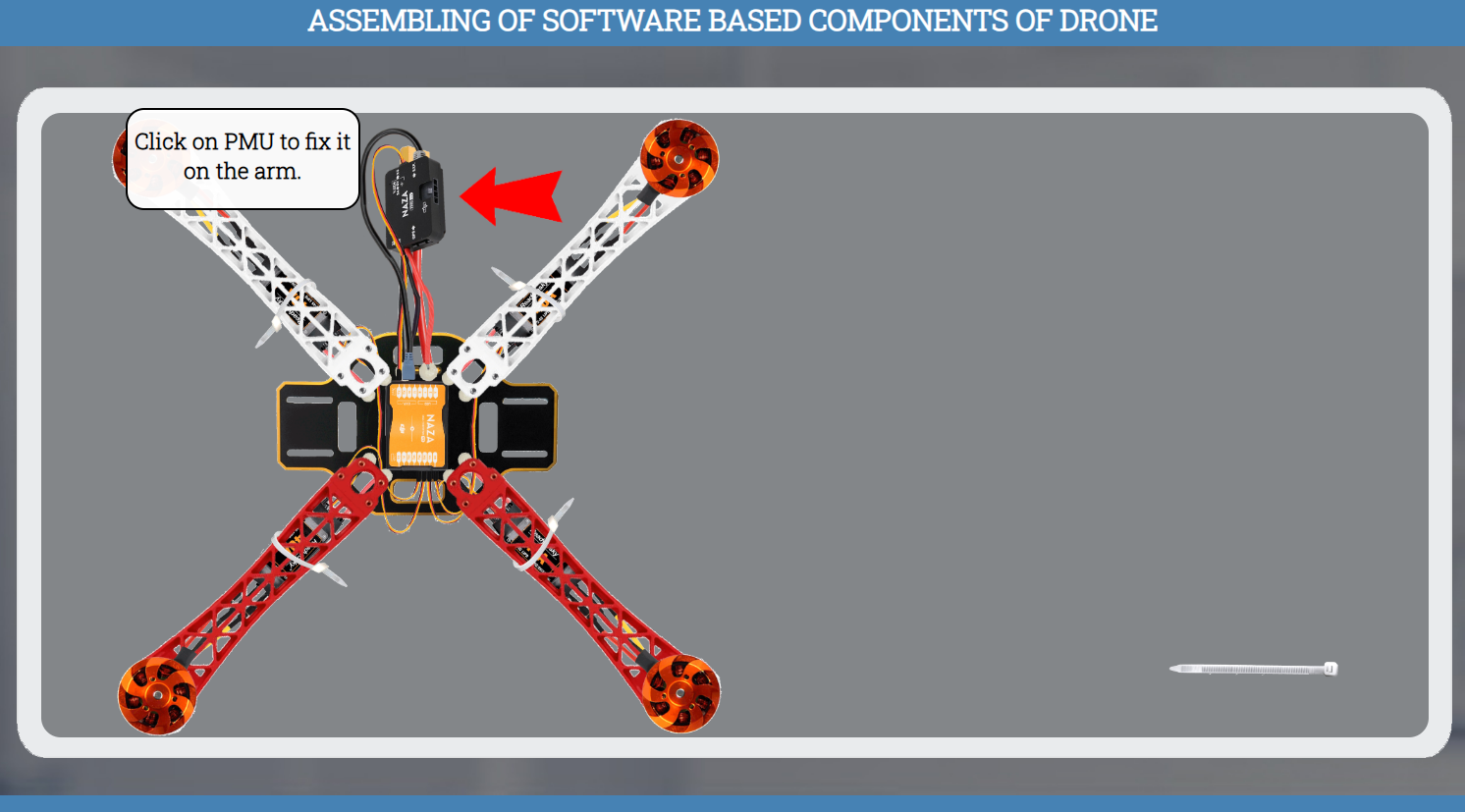
click on PMU to fix it on the arm
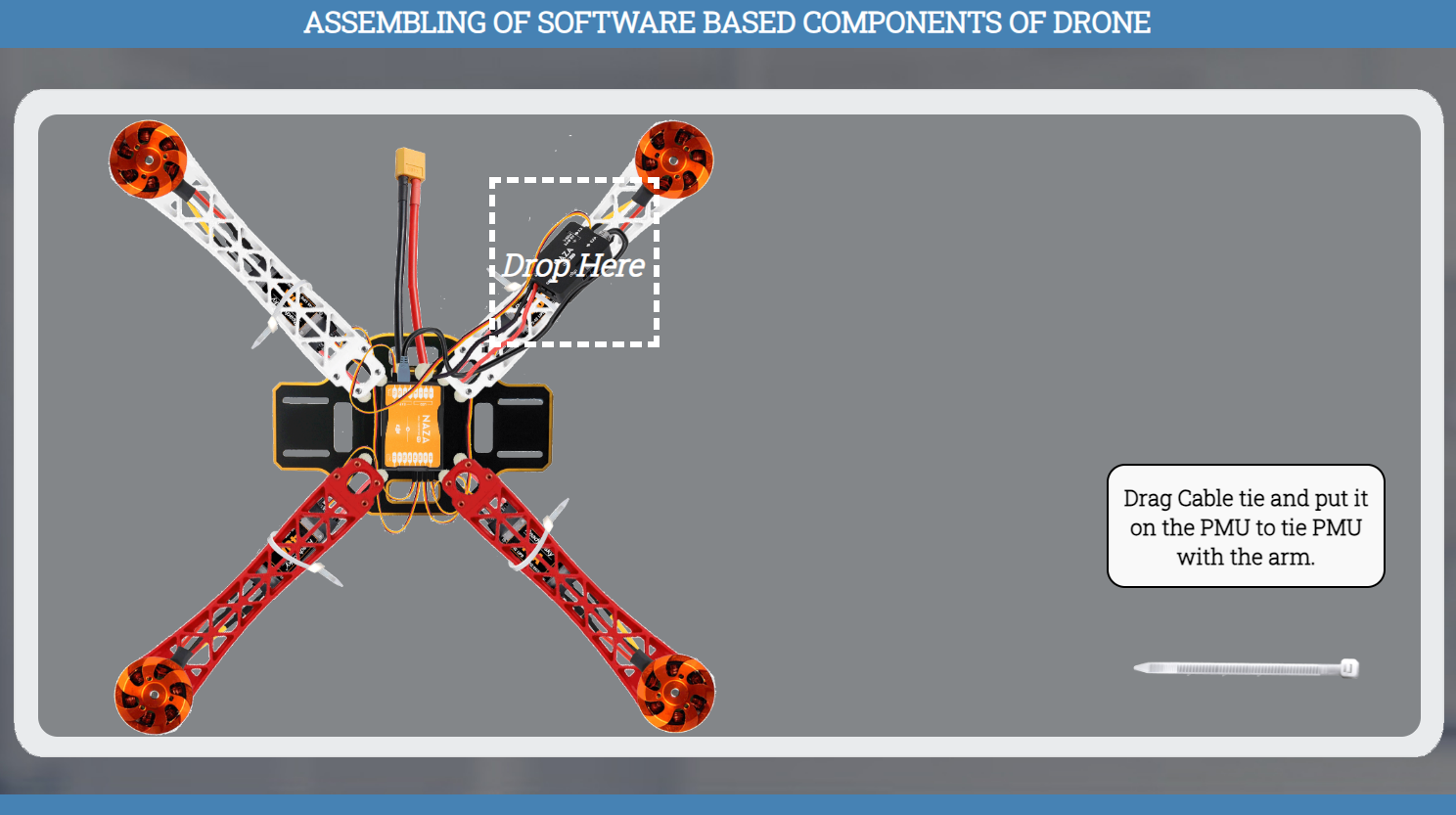
Drag Cable tie and put it on the PMU to tie PMU with the arm.
click the next button
Choose the option and click on the submit button
click the next button
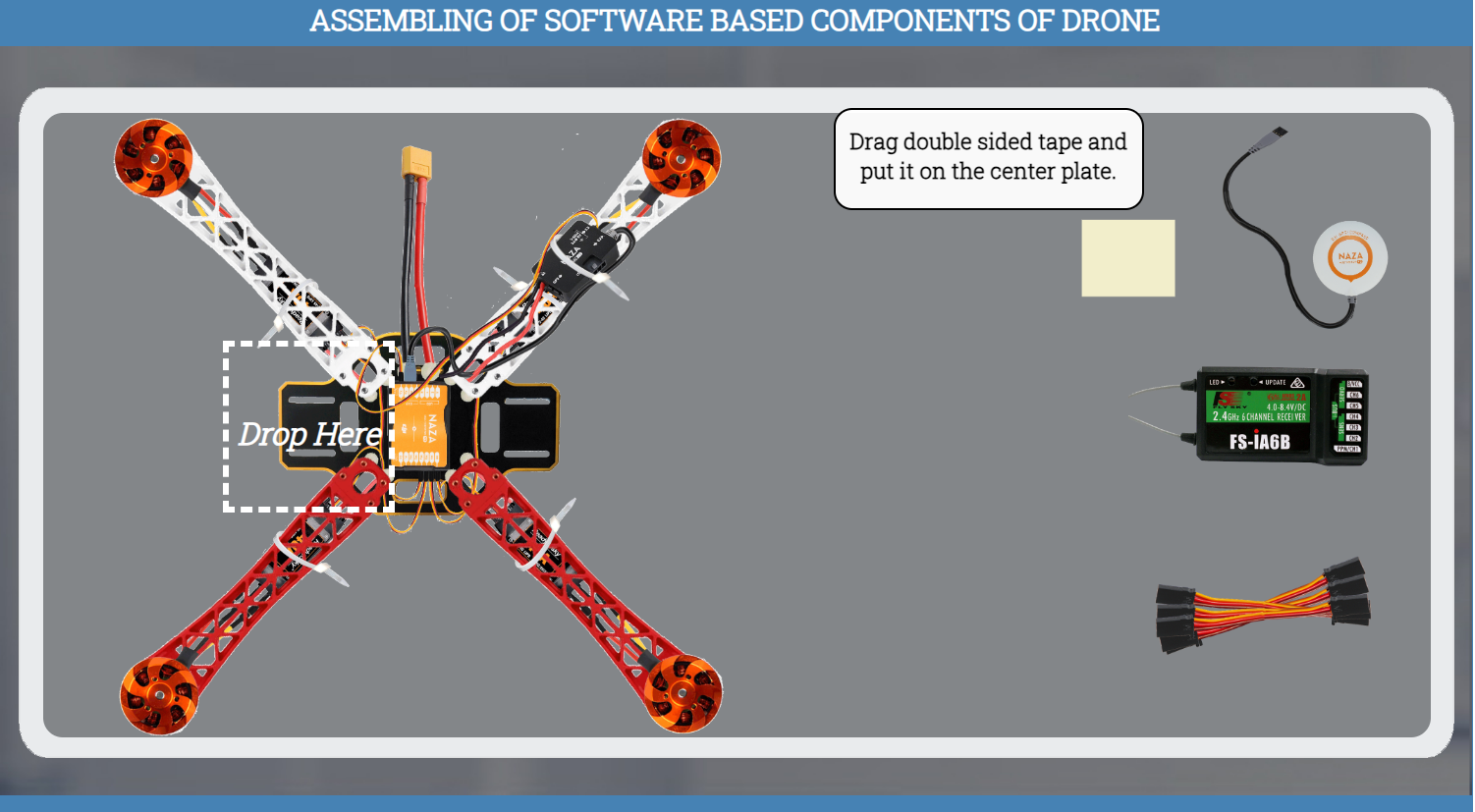
Drag double sided tape and put it on the center plate.
click the ok button
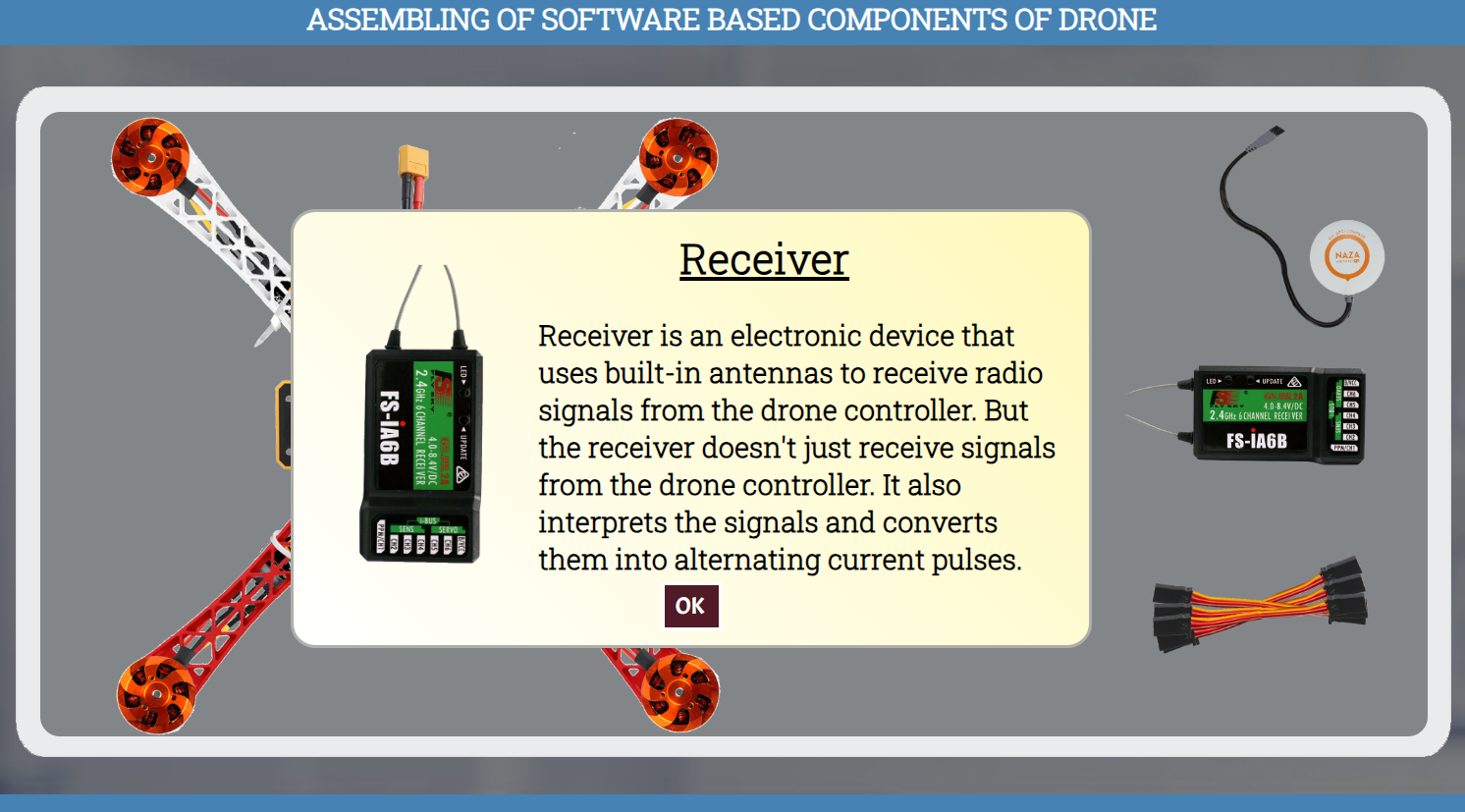
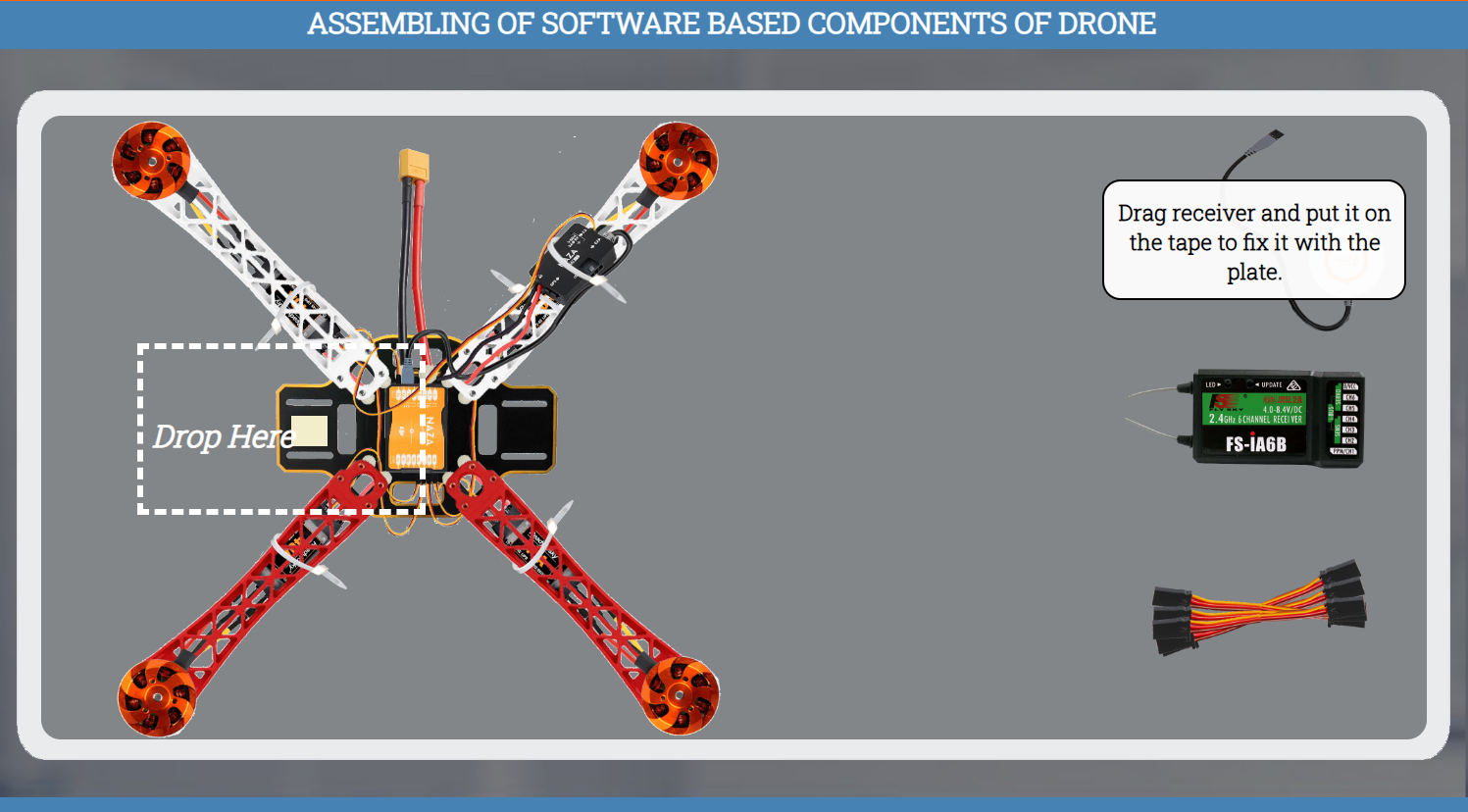
Drag receiver and put it on the tape to fix it with the plate.
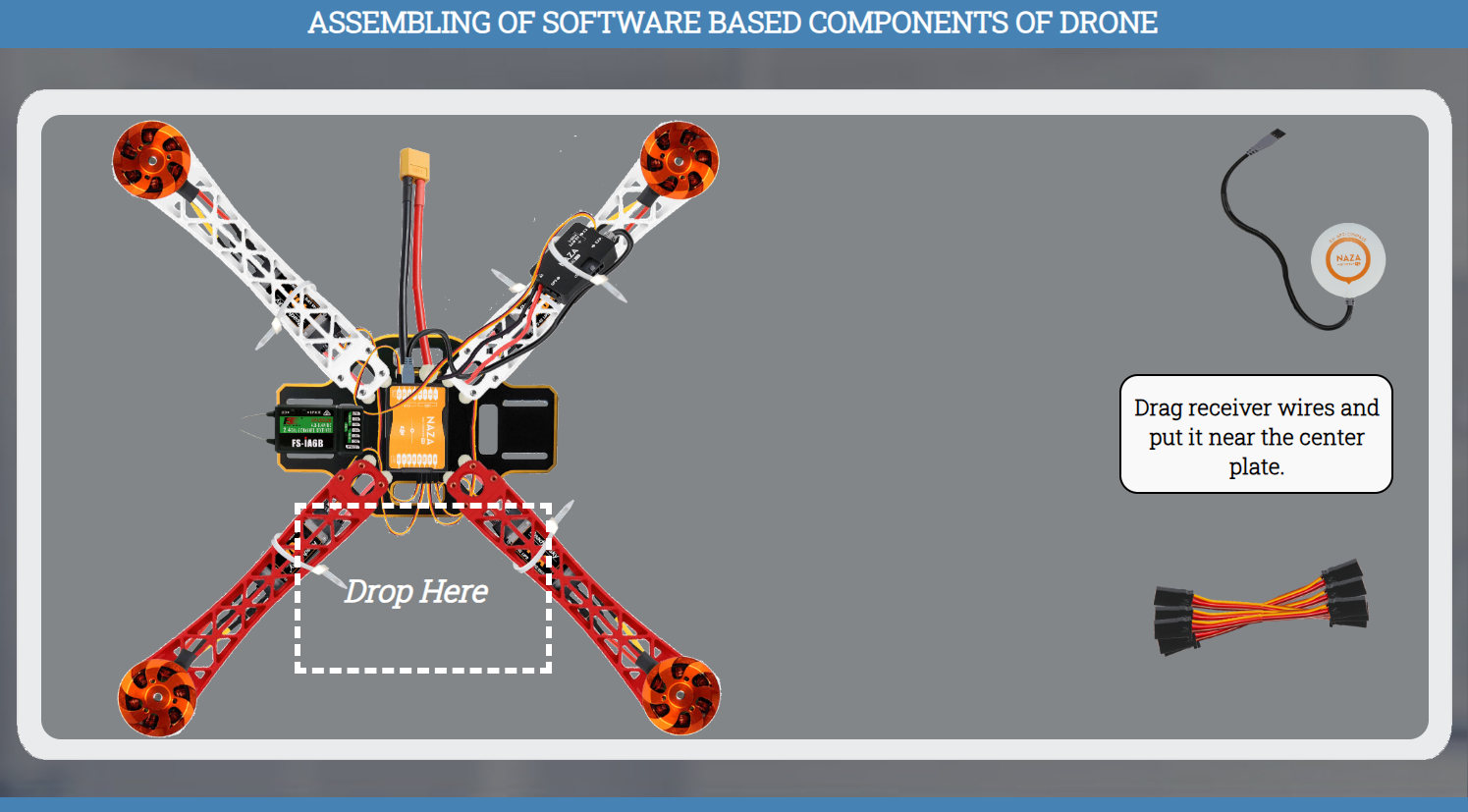
Drag receiver wires and put it near the center plate.
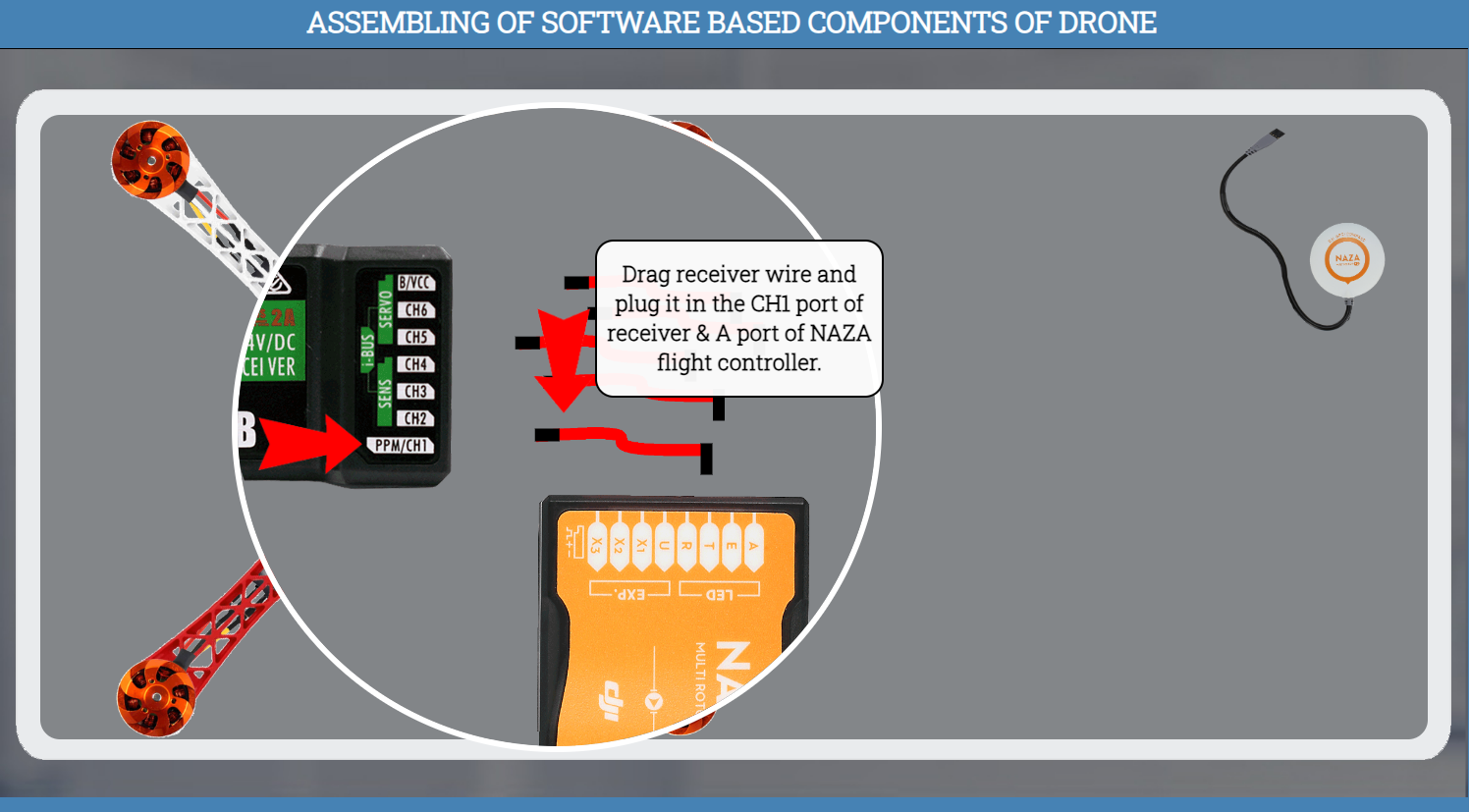
Drag receiver wire and plug it in the CH1 port of receiver & A port of NAZA flight controller.
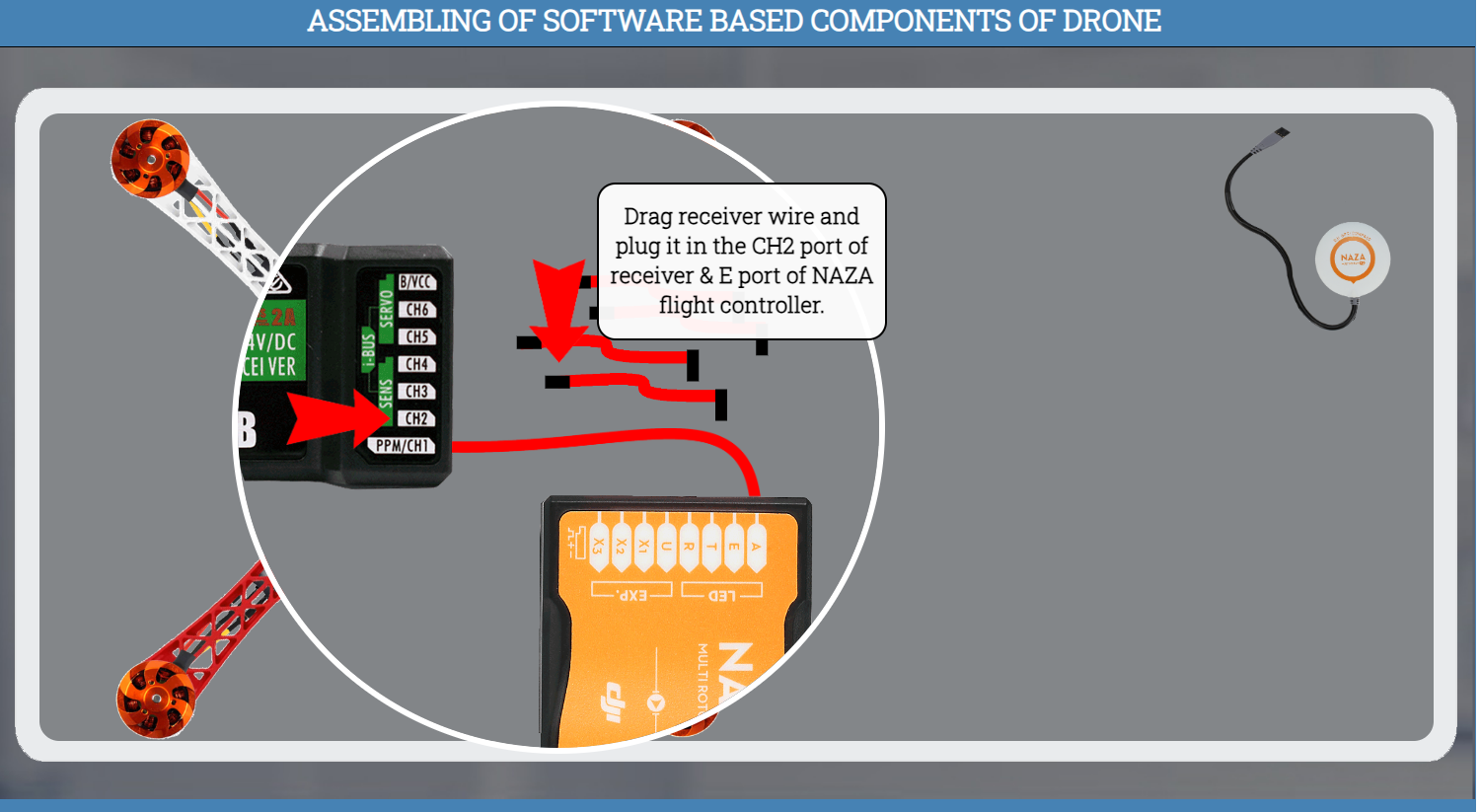
Drag receiver wire and plug it in the CH2 port of receiver & E port of NAZA flight controller.
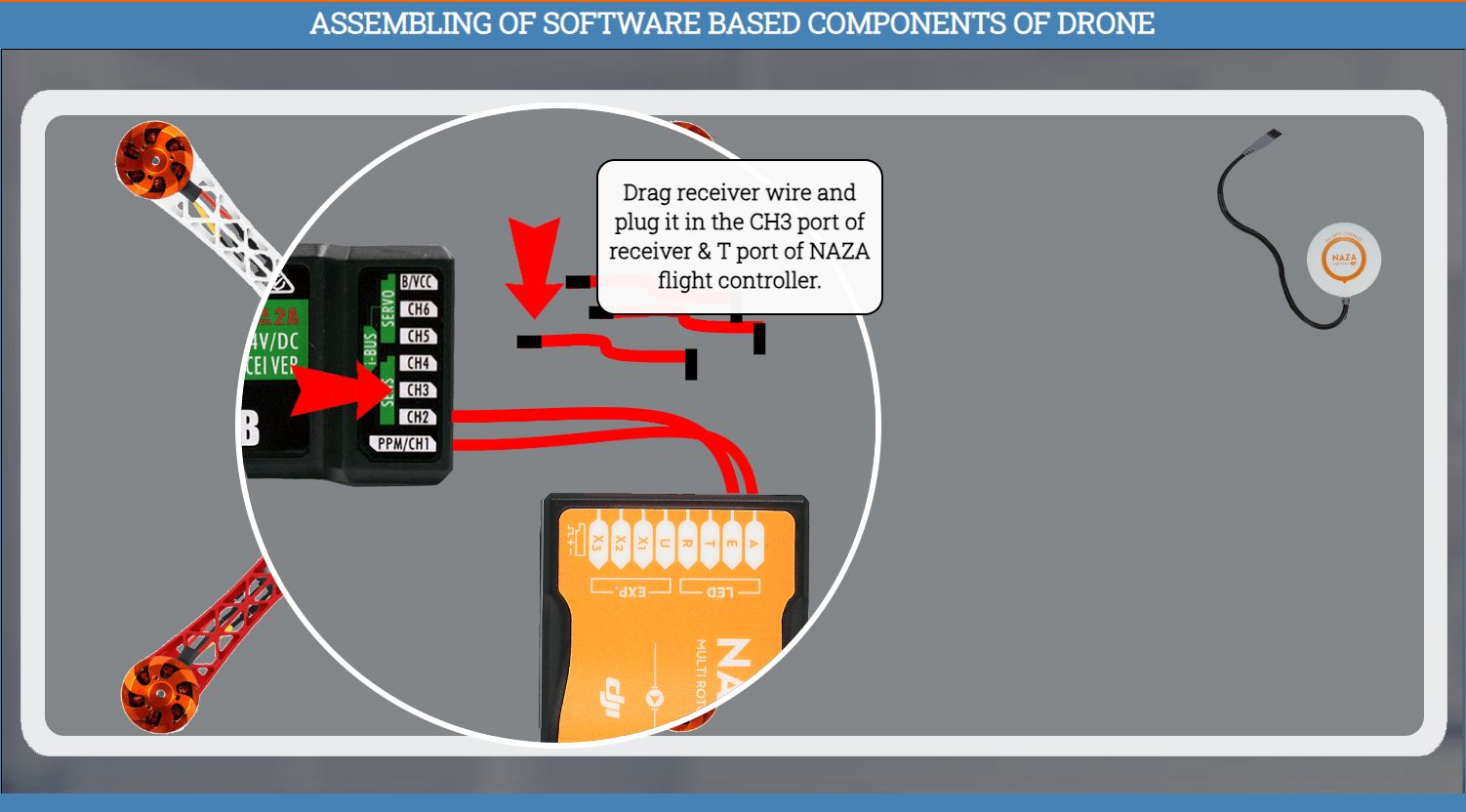
Drag receiver wire and plug it in the CH3 port of receiver & T port of NAZA flight controller.
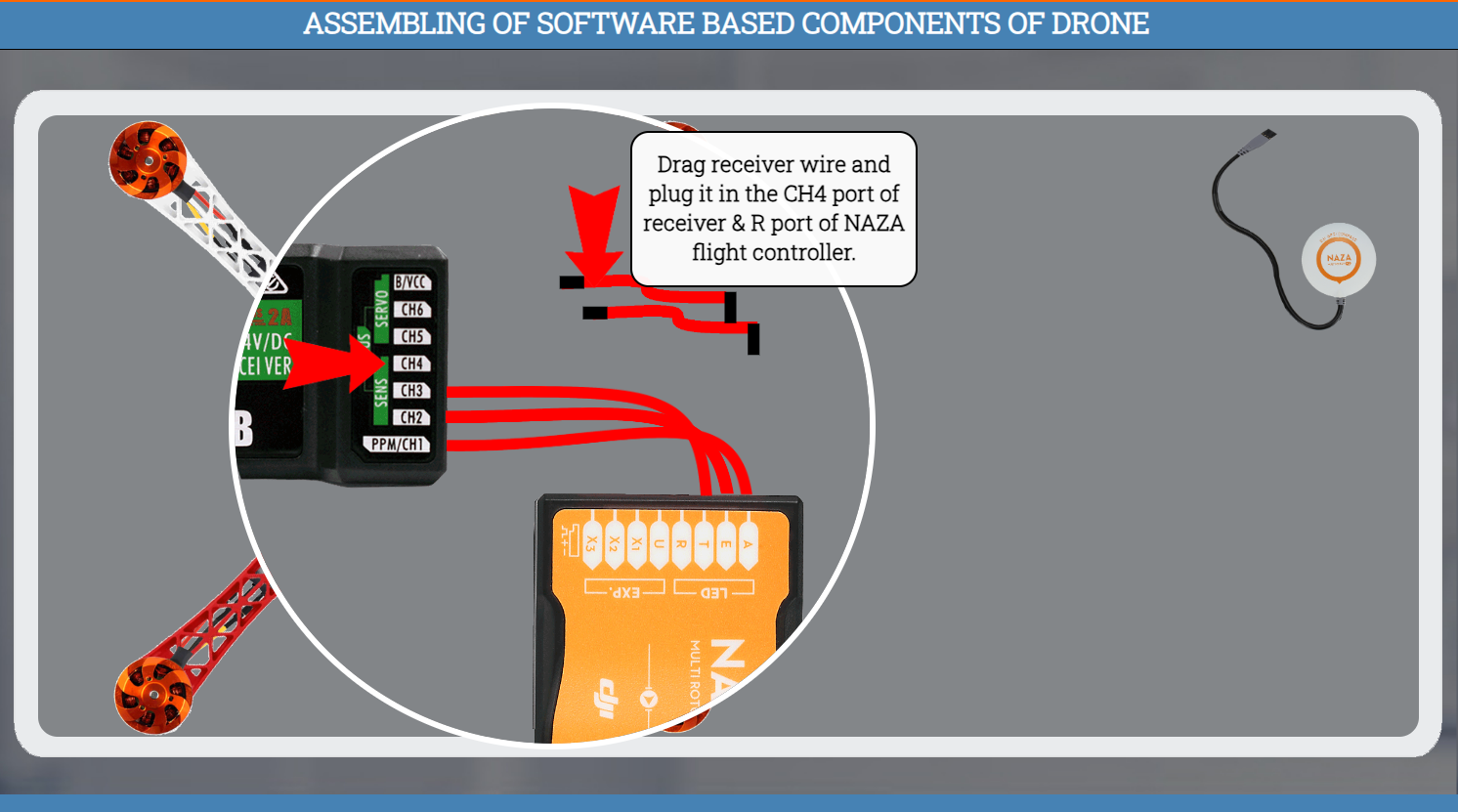
Drag receiver wire and plug it in the CH4 port of receiver & R port of NAZA flight controller.
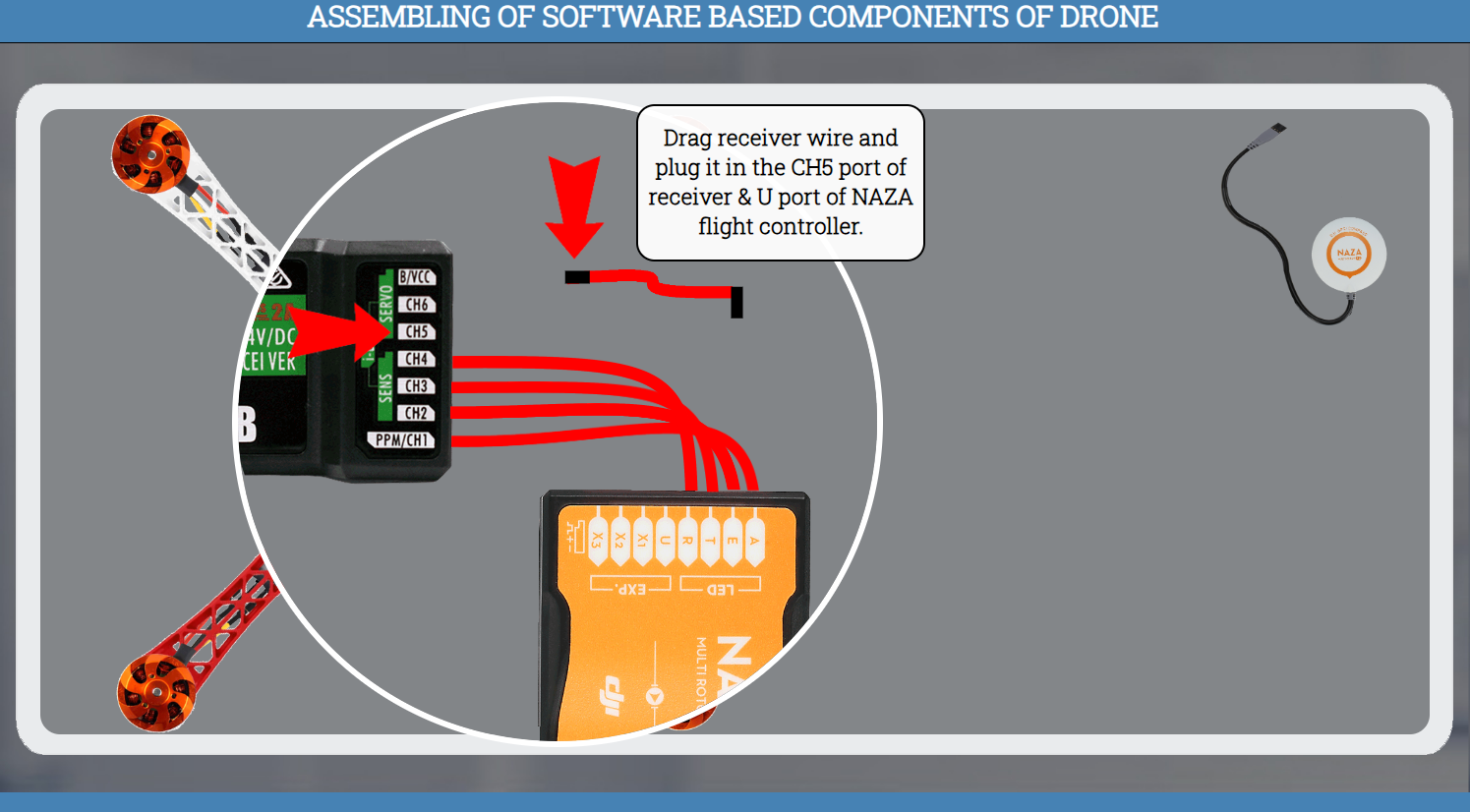
Drag receiver wire and plug it in the CH5 port of receiver & U port of NAZA flight controller.
click the ok button
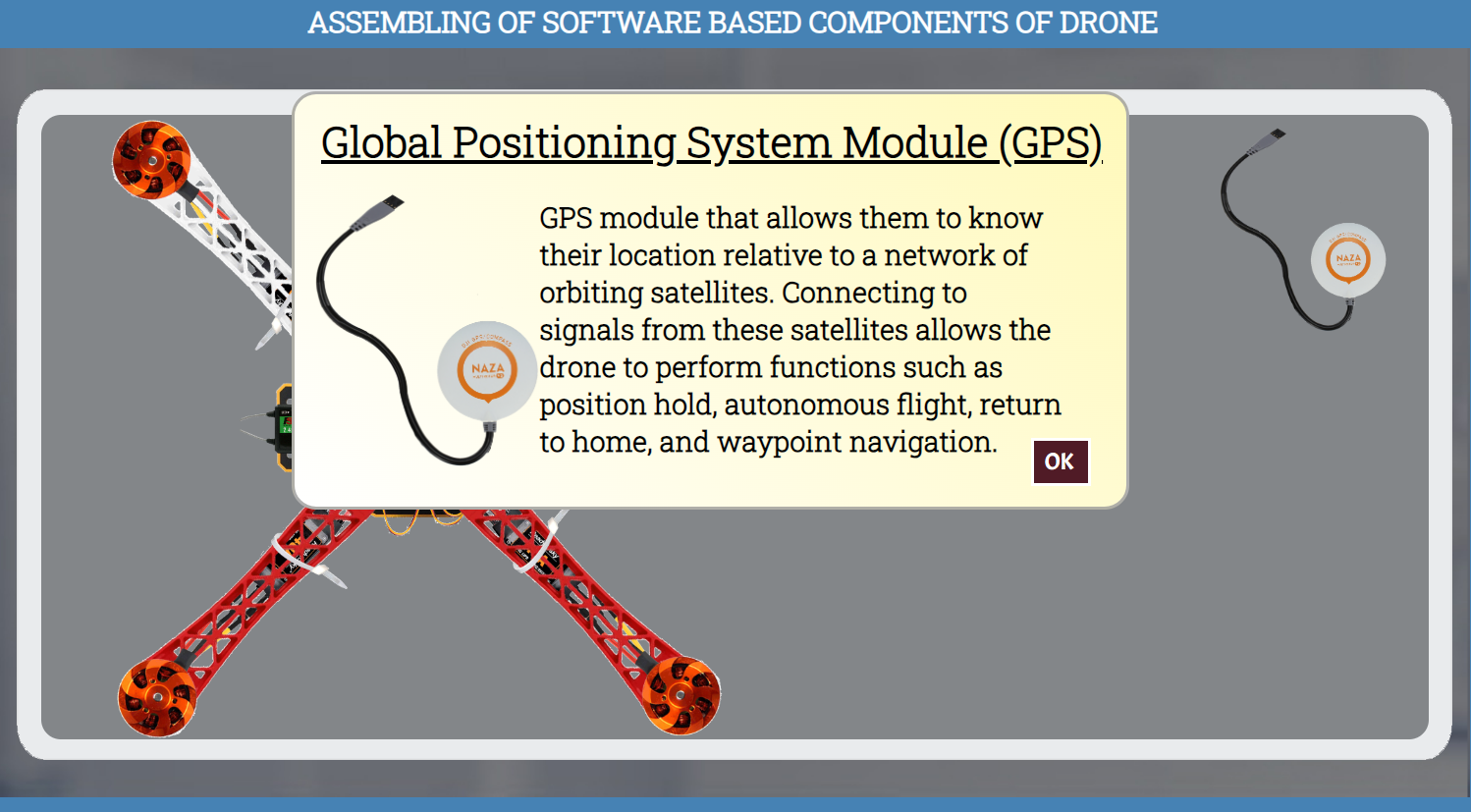
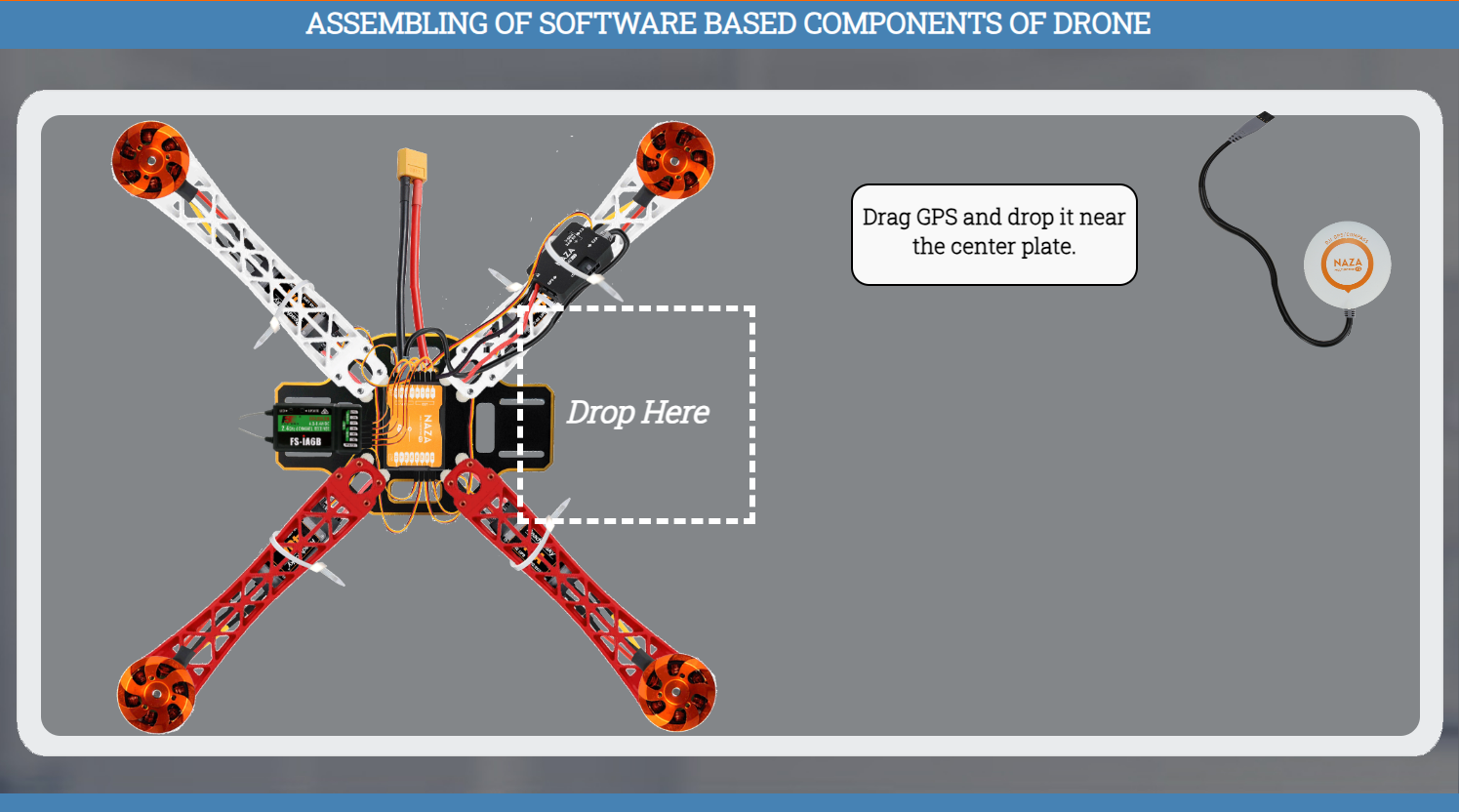
Drag GPS and drop it near the center plate.
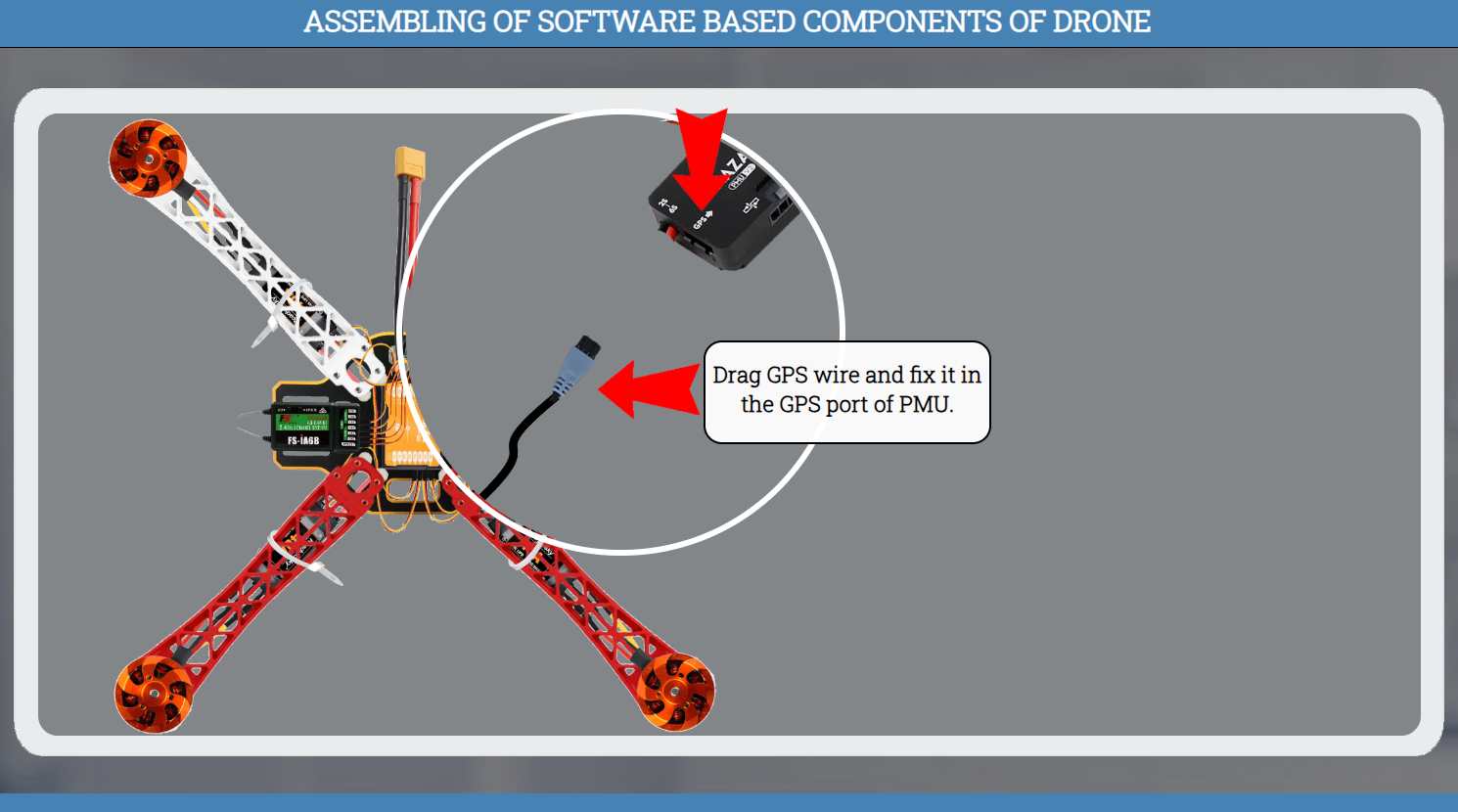
Drag GPS wire and fix it in the GPS port of PMU.
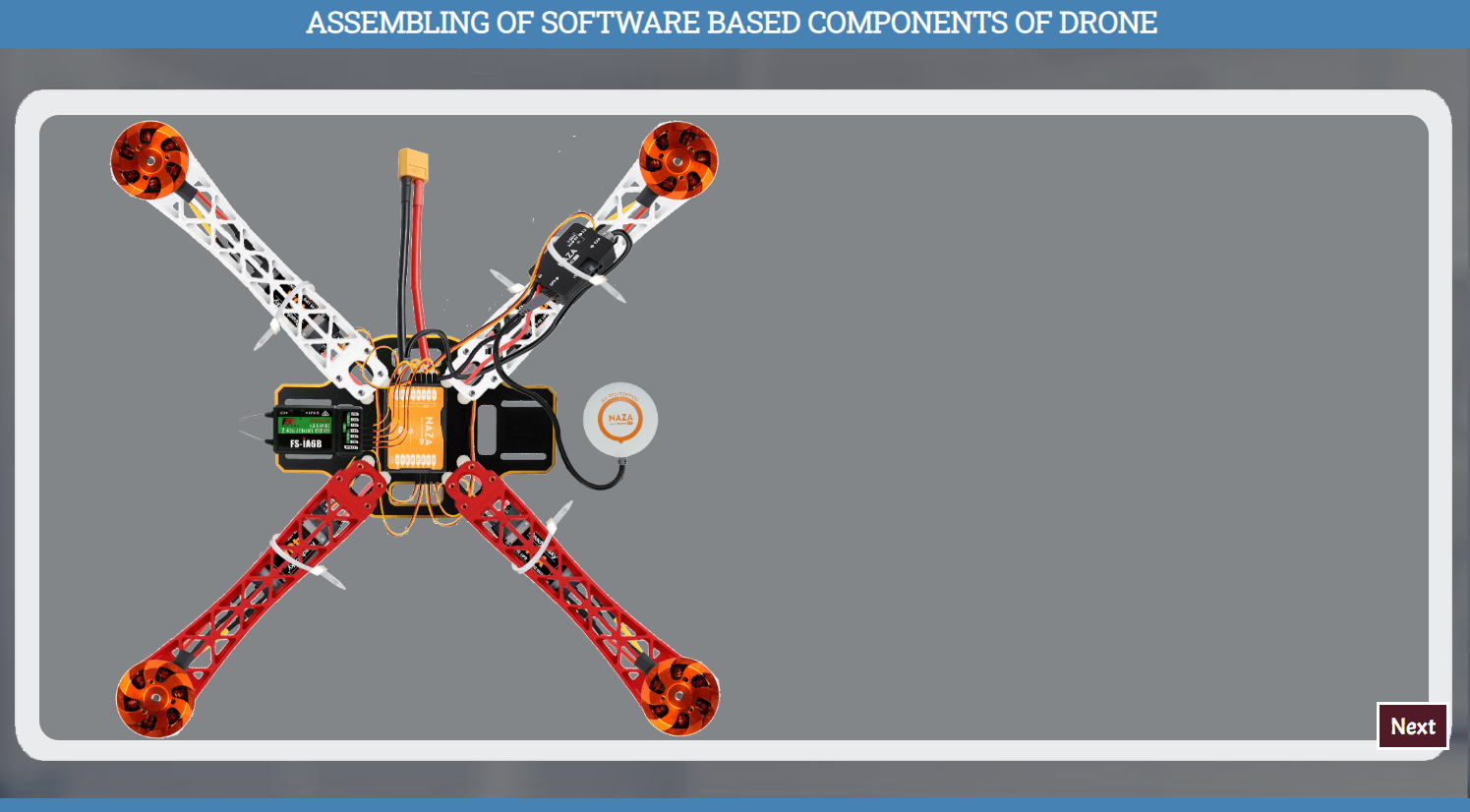
click the next button
Choose the option and click on the submit button
click the next button
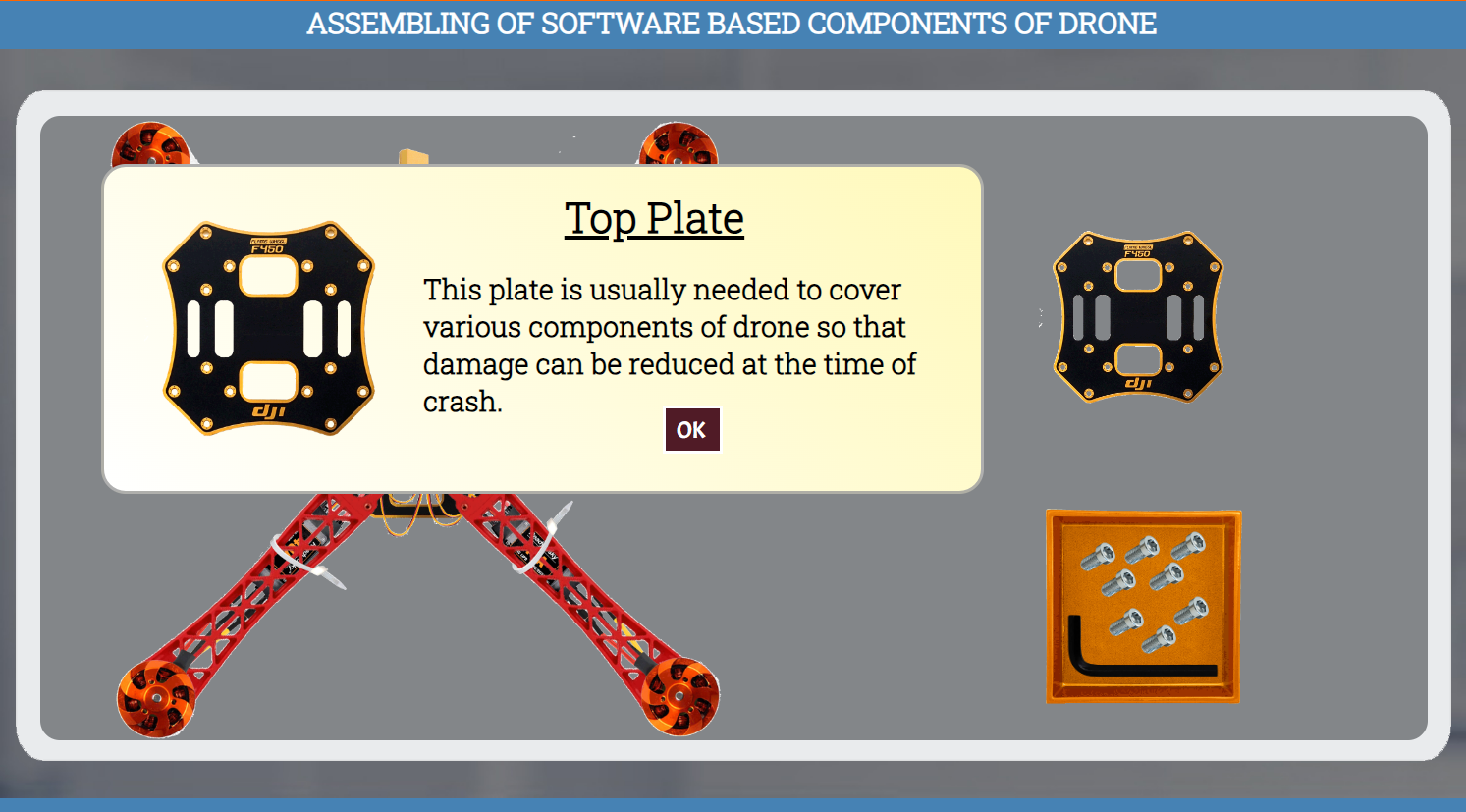
click the ok button
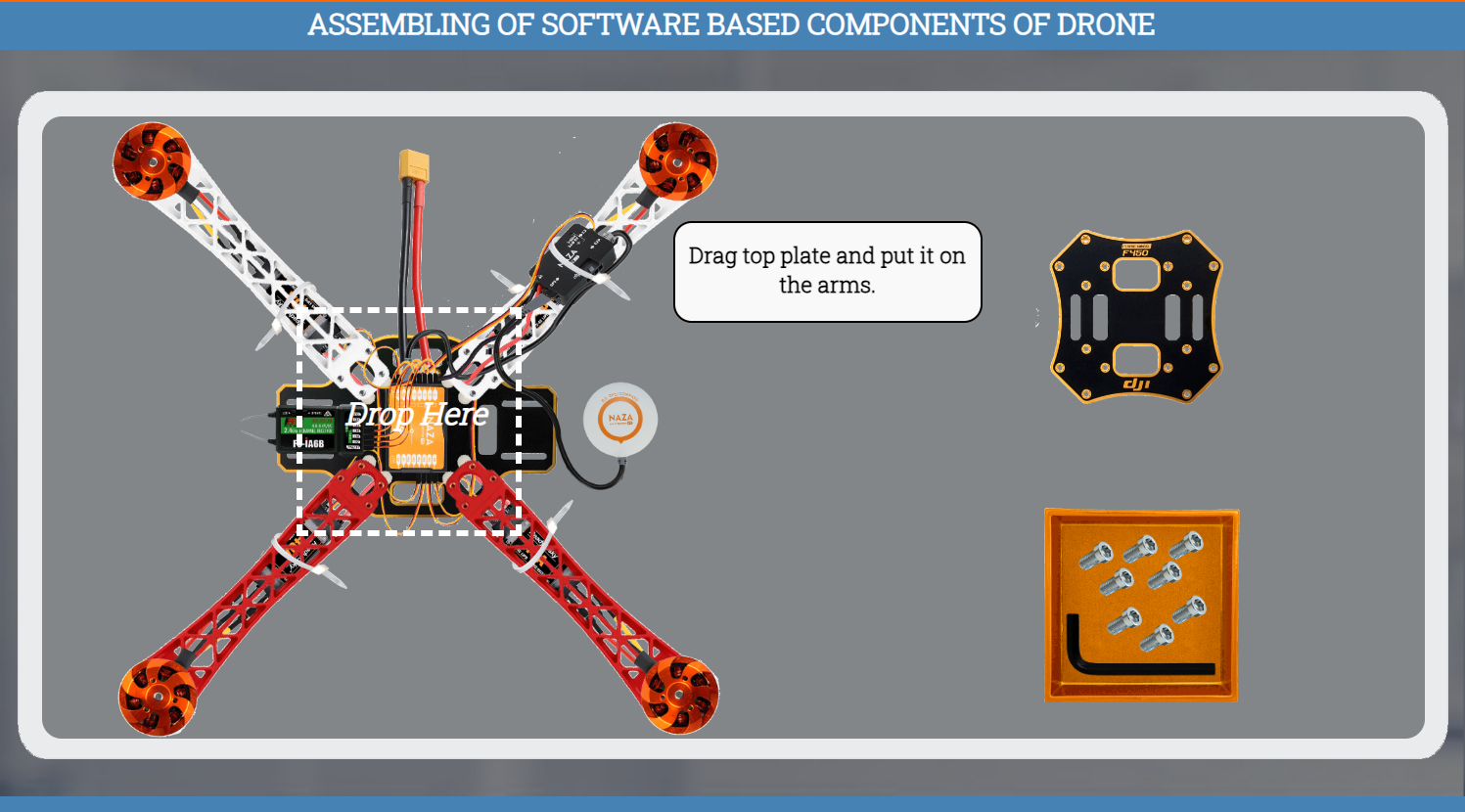
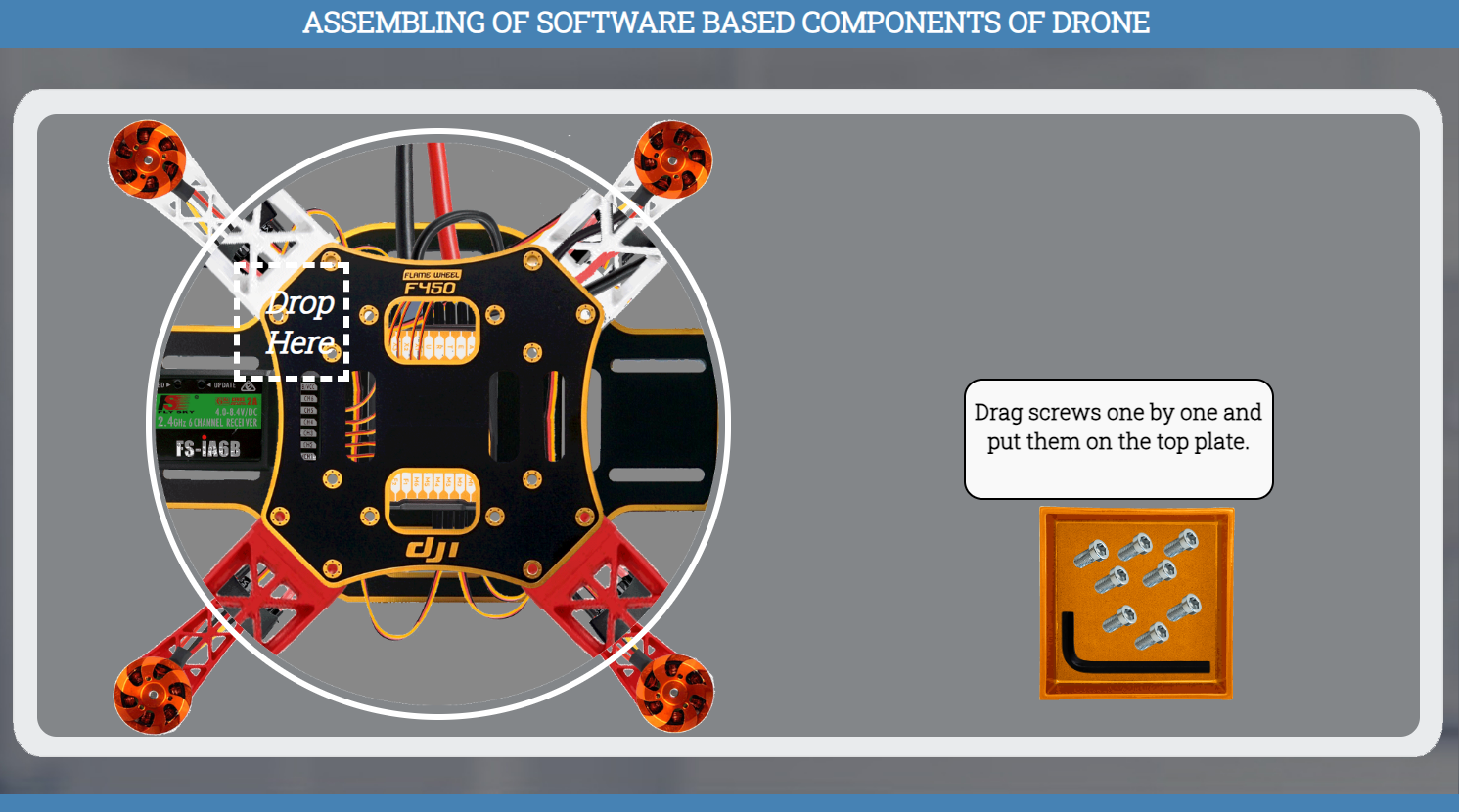
Drag top plate and put it on the arms.
Drag screws one by one and put them on the top plate.
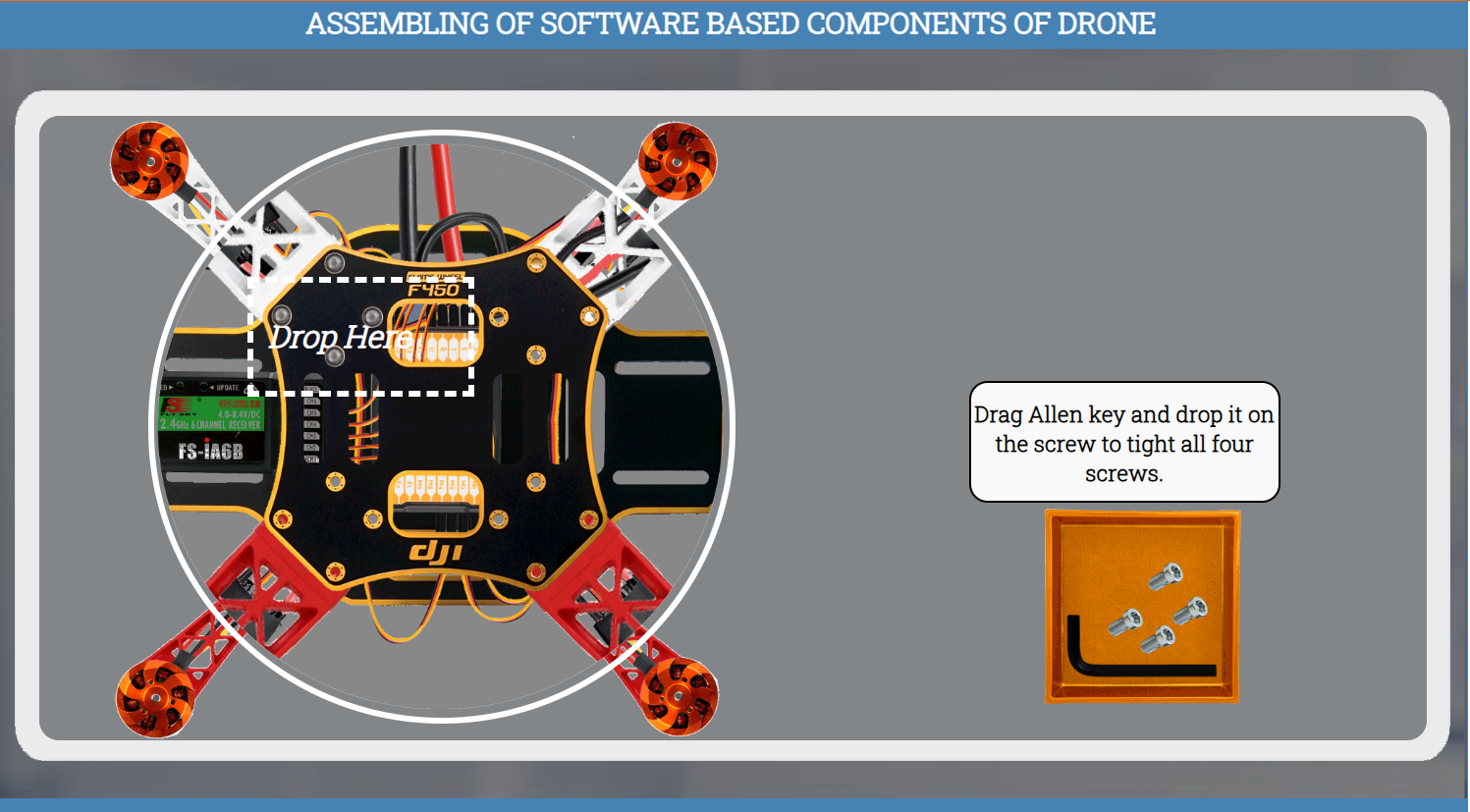
Drag Allen key and drop it on the screw to tight all four screws.
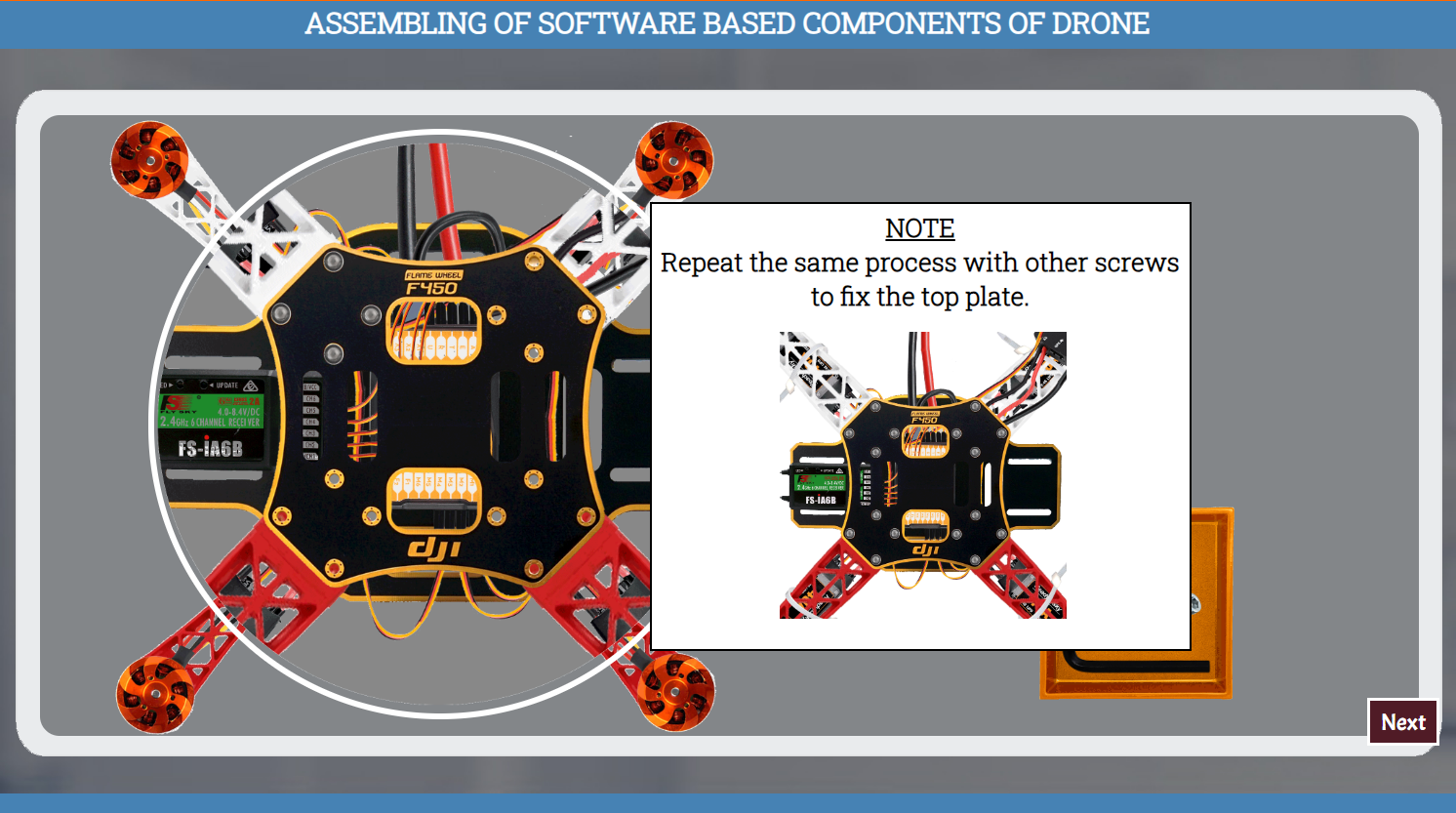
NOTE :Repeat the same process with other screws to fix the top plate.
click the next button
Choose the option and click on the submit button
click the next button
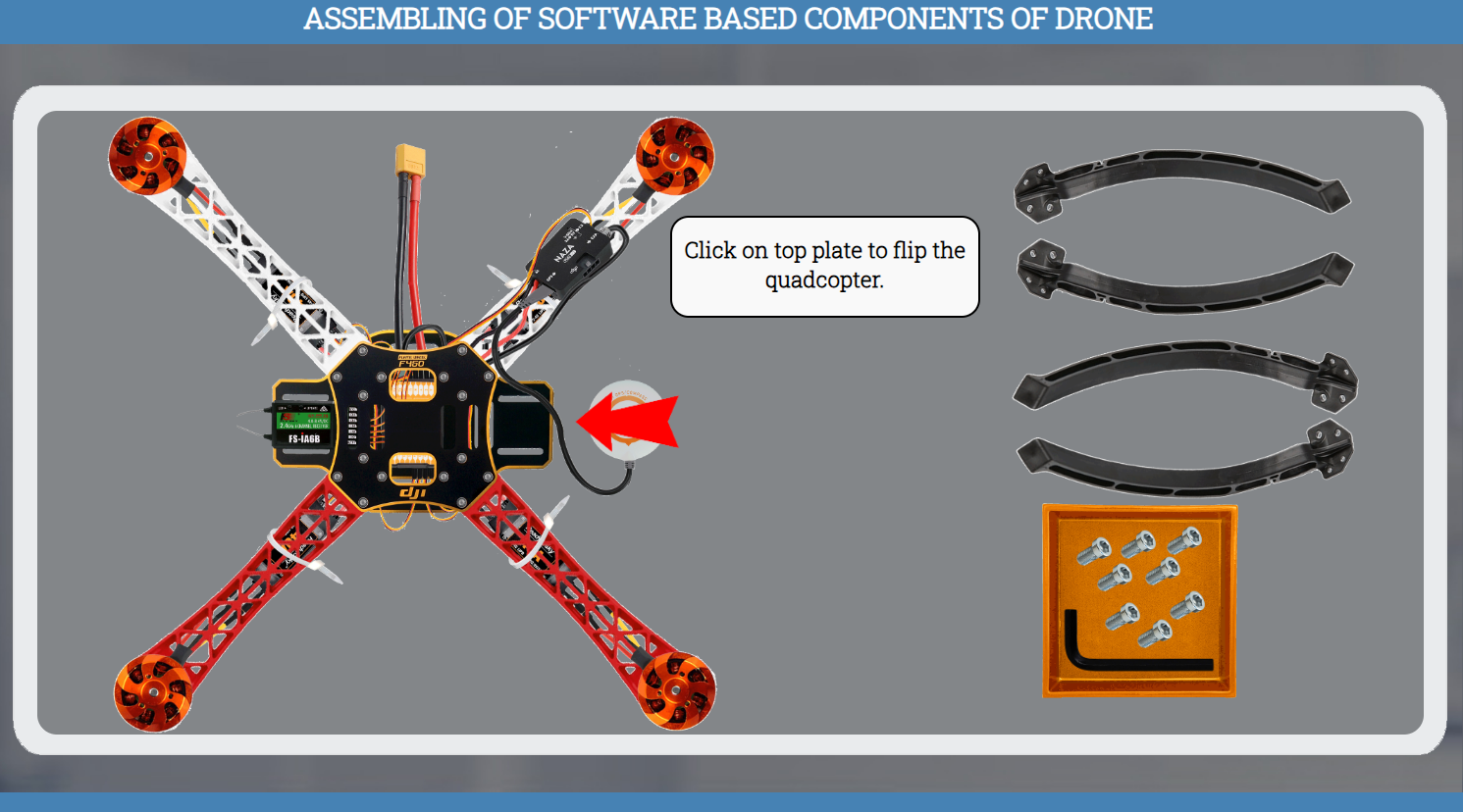
Click on top plate to flip the quadcopter.
click the ok button
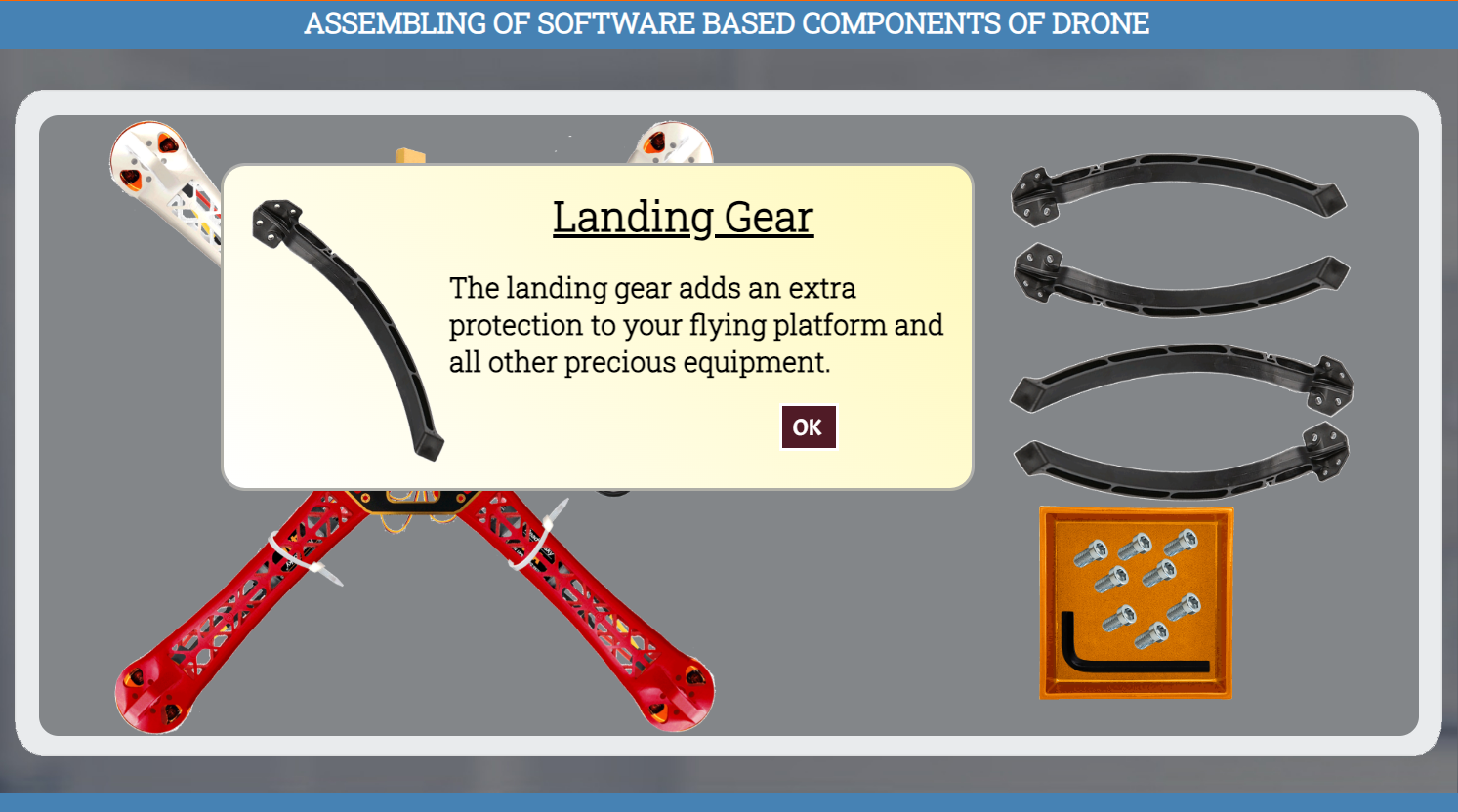
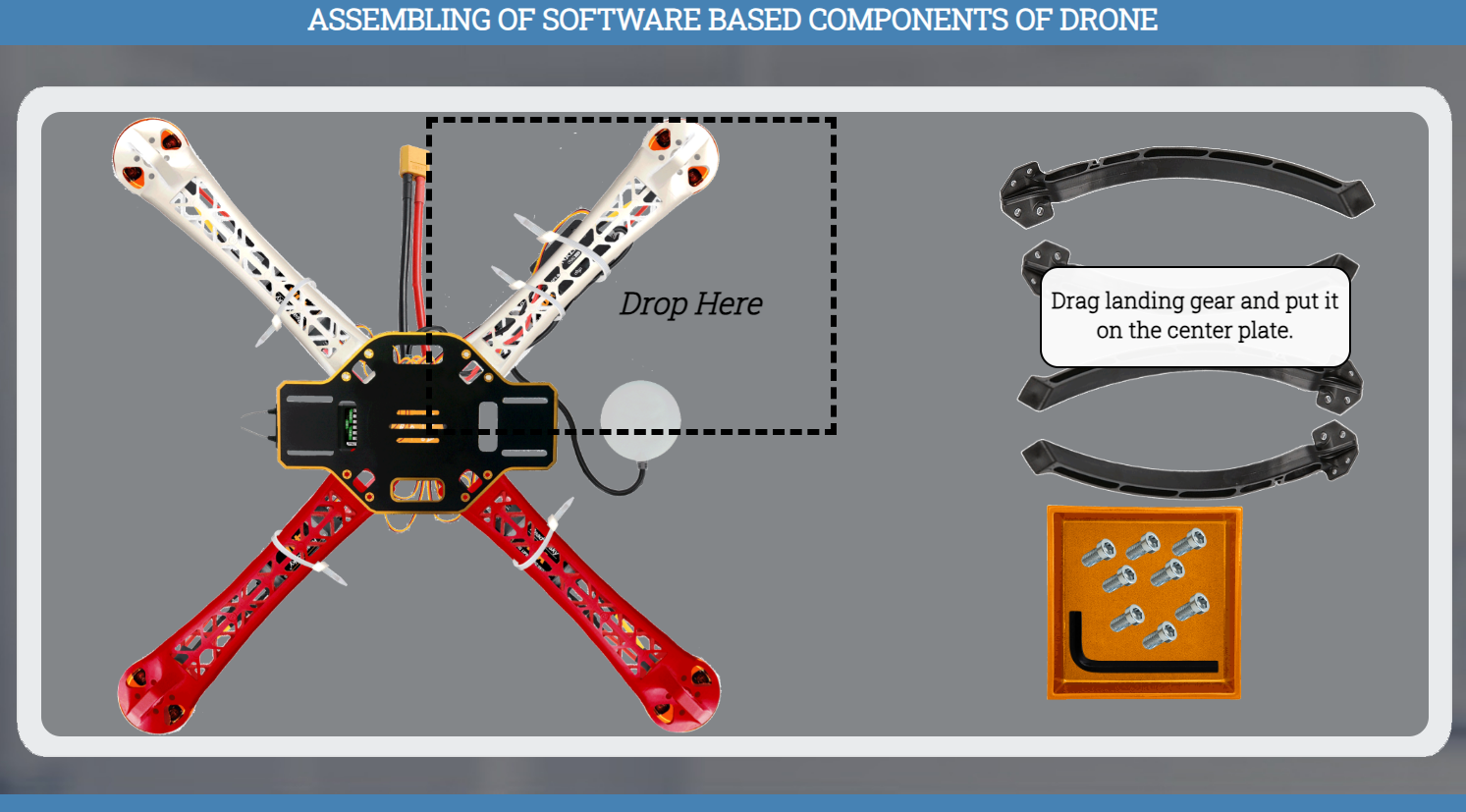
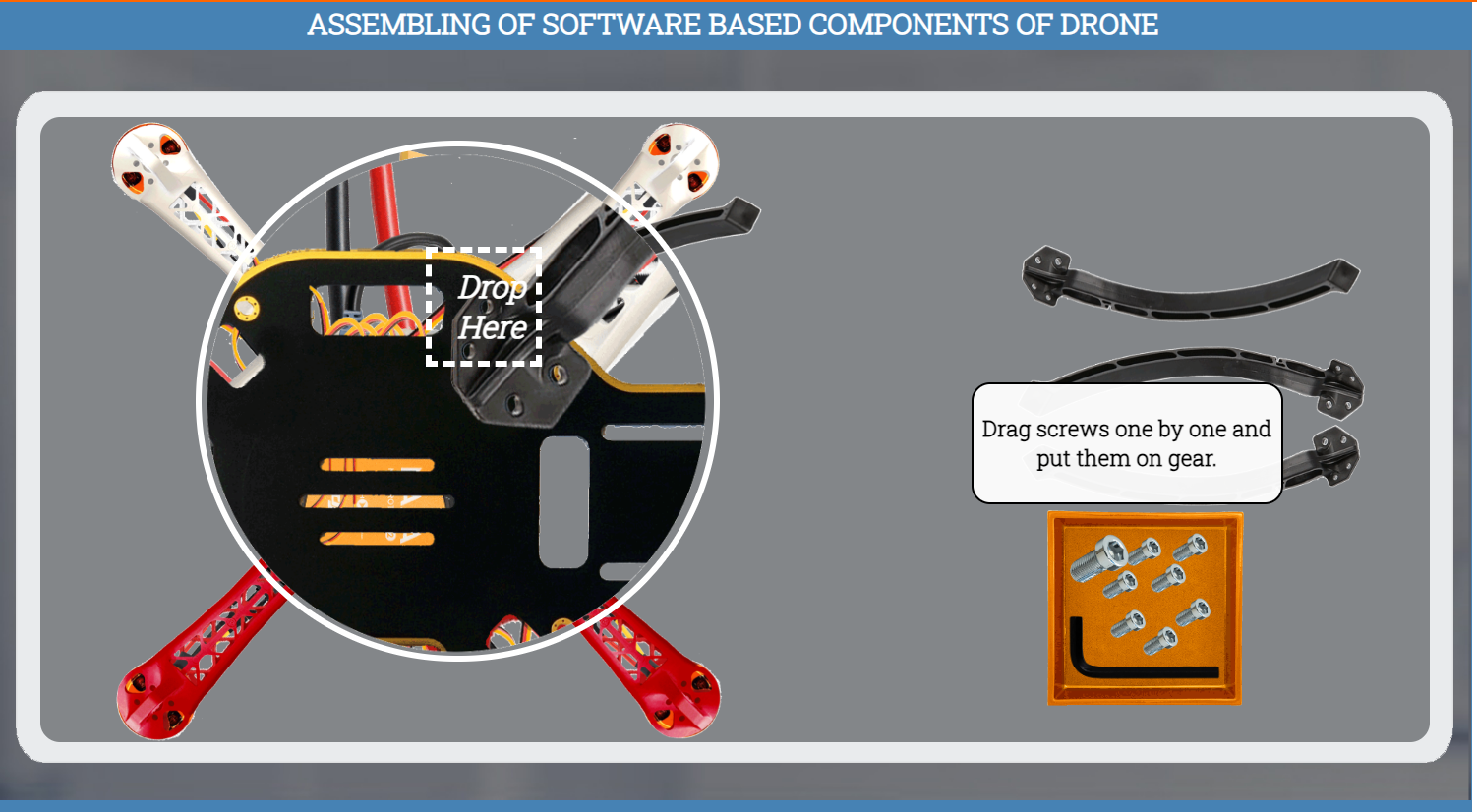
Drag landing gear and put it on the center plate.
Drag screws one by one and put them on gear.
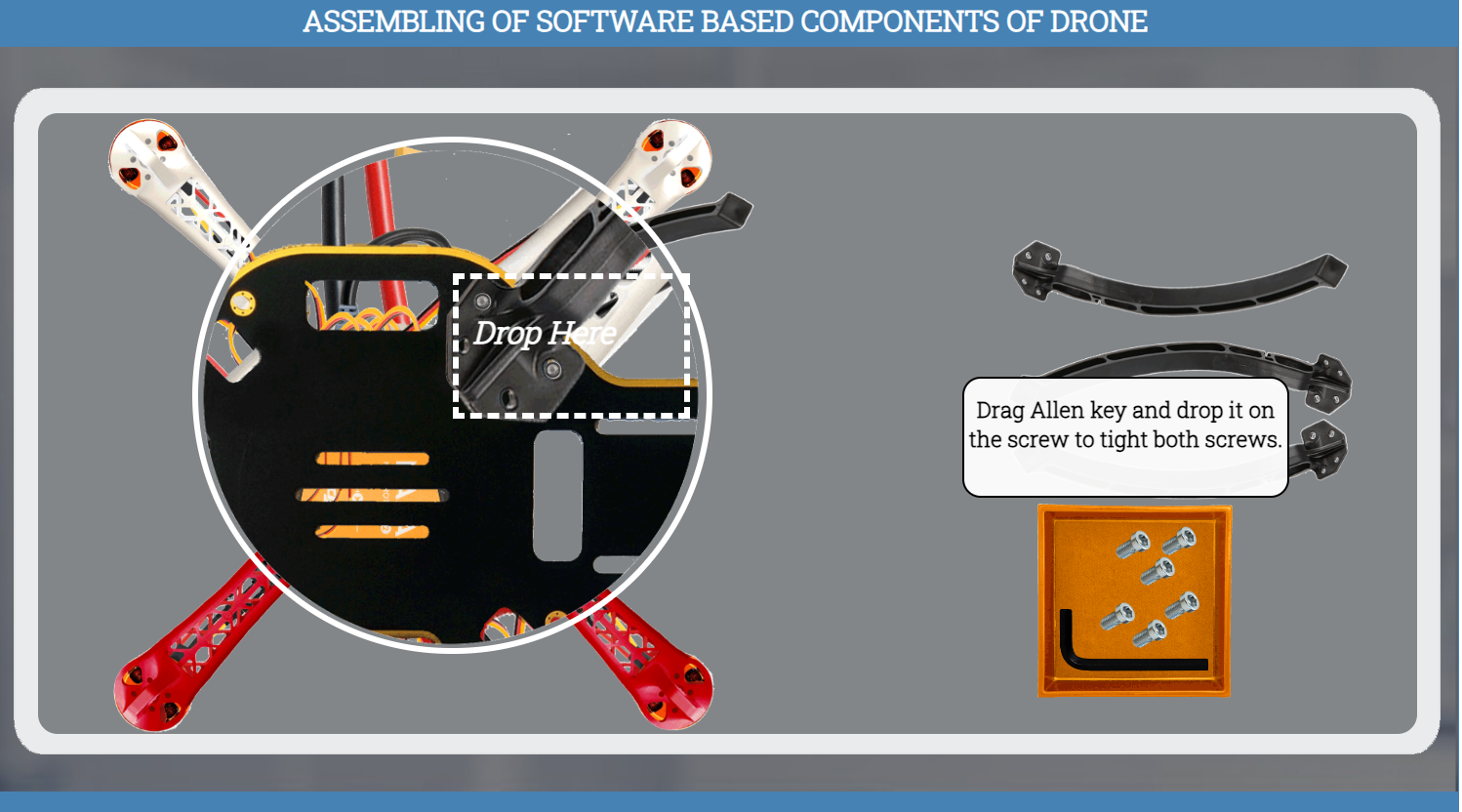
Drag Allen key and drop it on the screw to tight both screws.
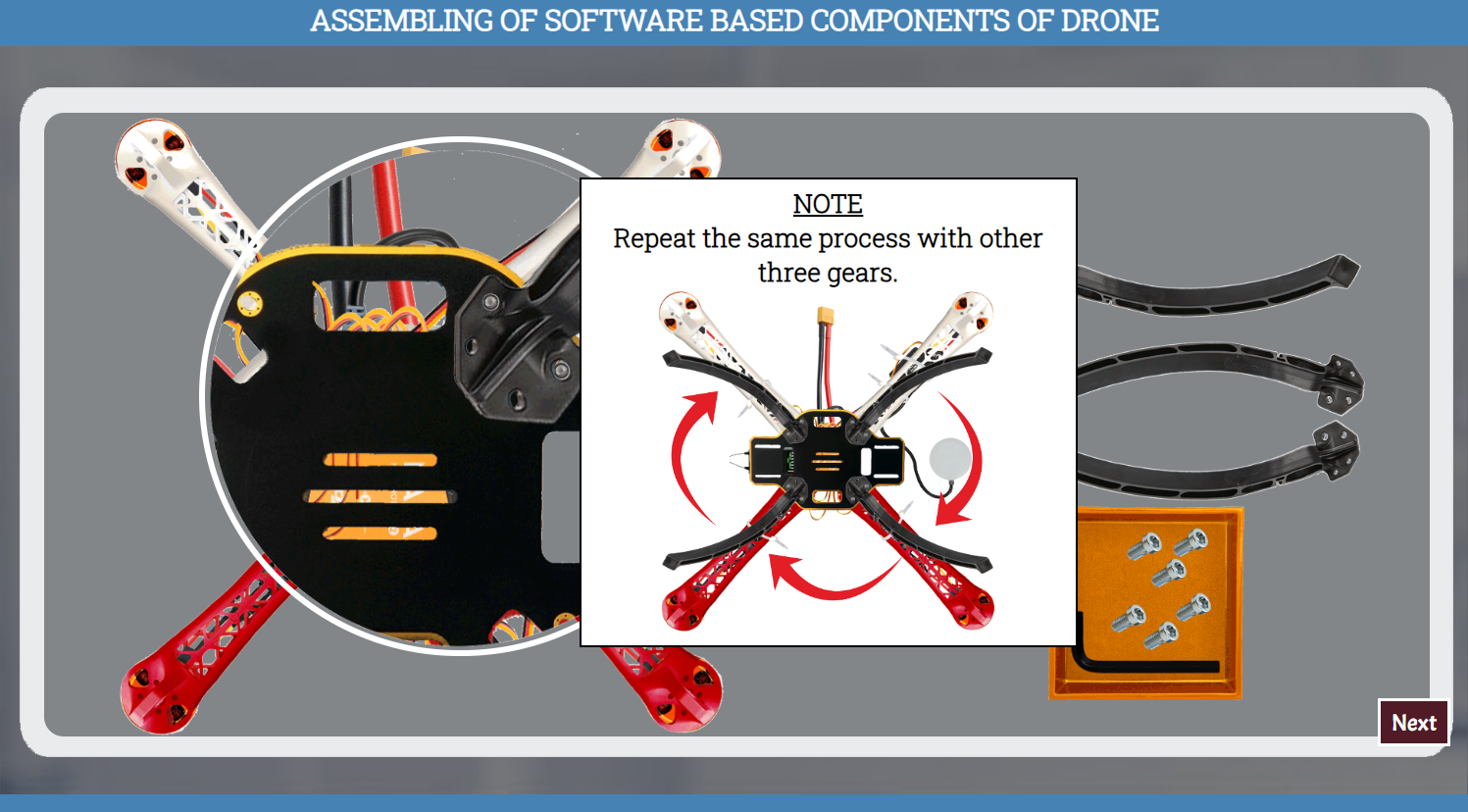
NOTE :Repeat the same process with other three gears.
click the next button
Choose the option and click on the submit button
click the next button
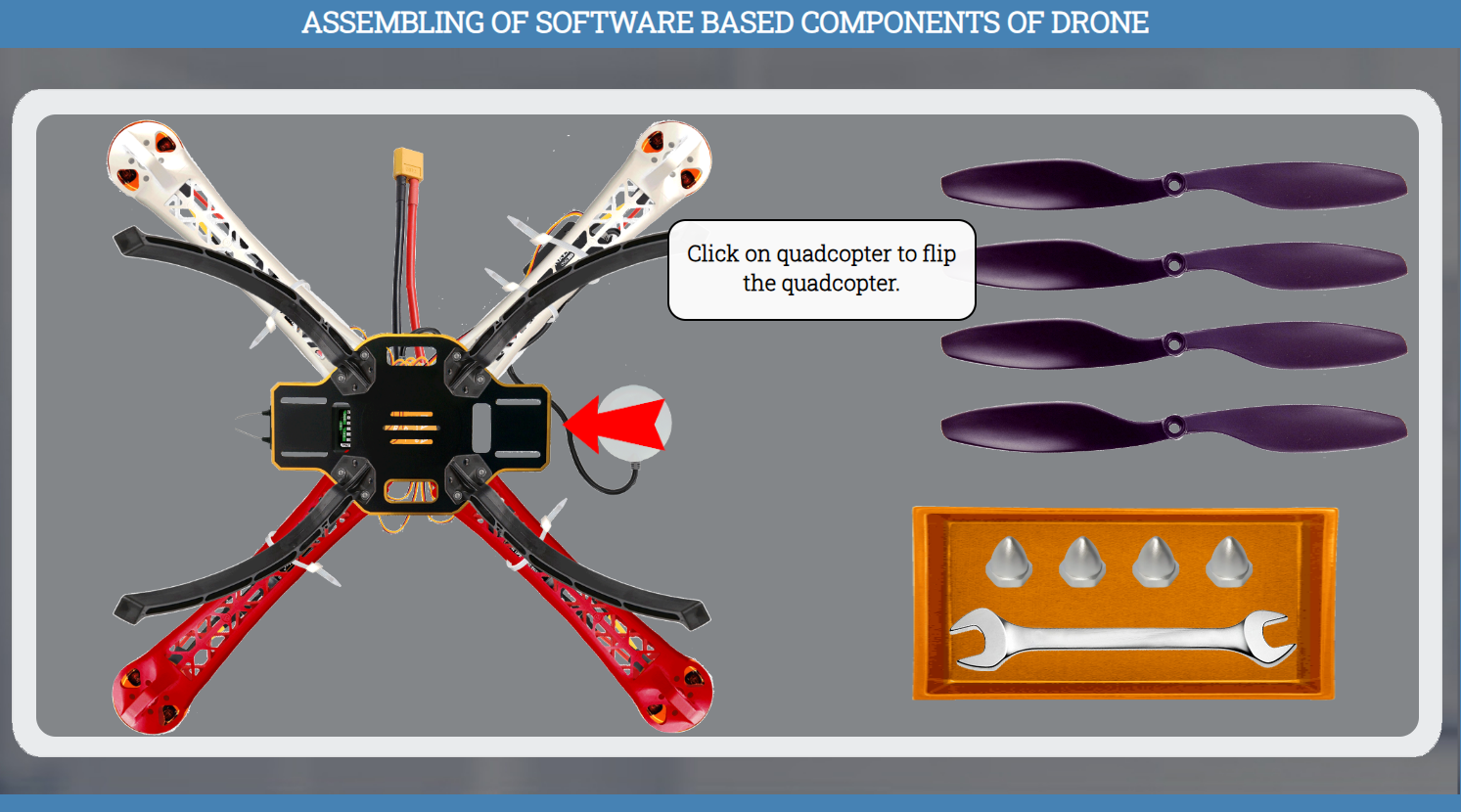
Click on quadcopter to flip the quadcopter.
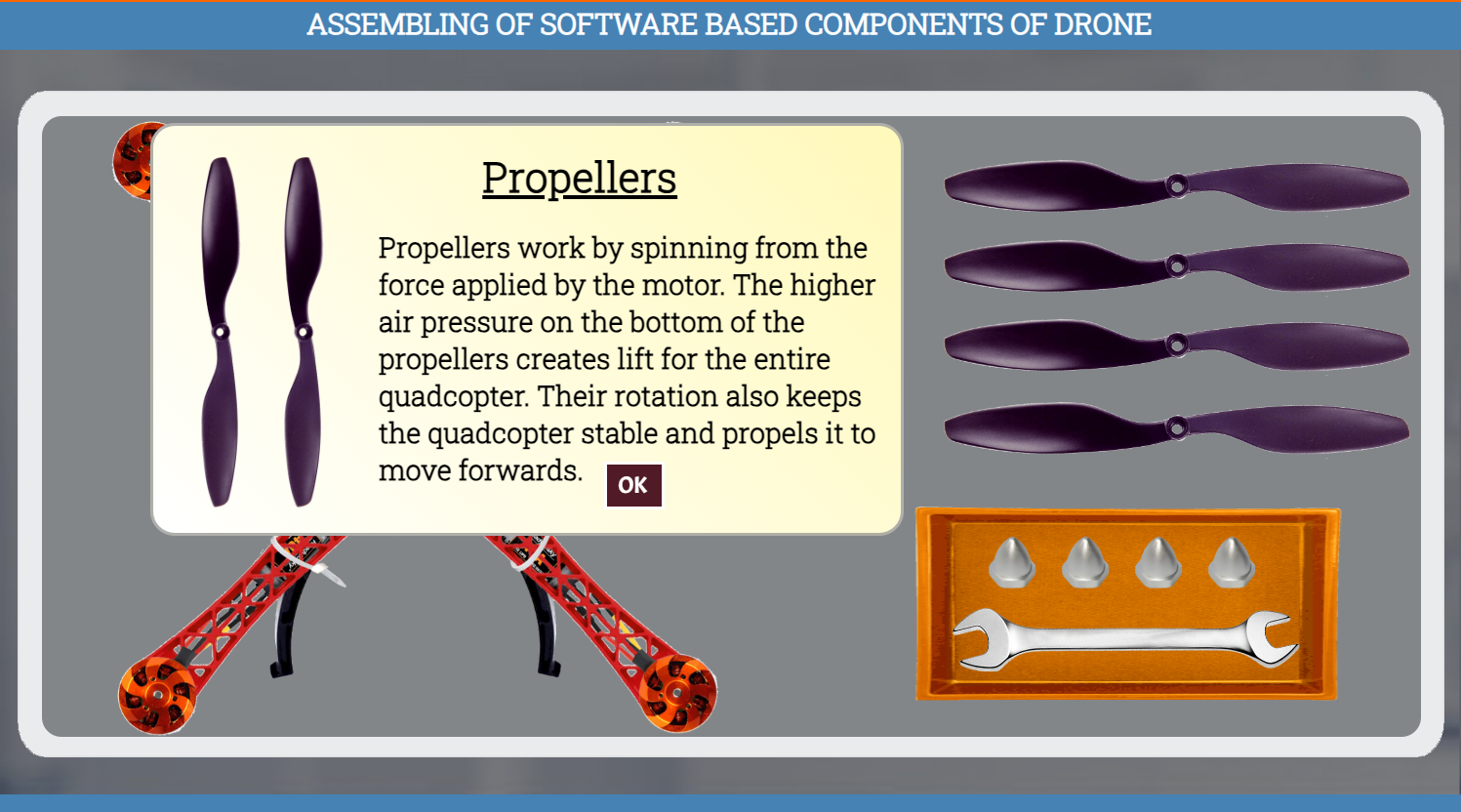
click the ok button
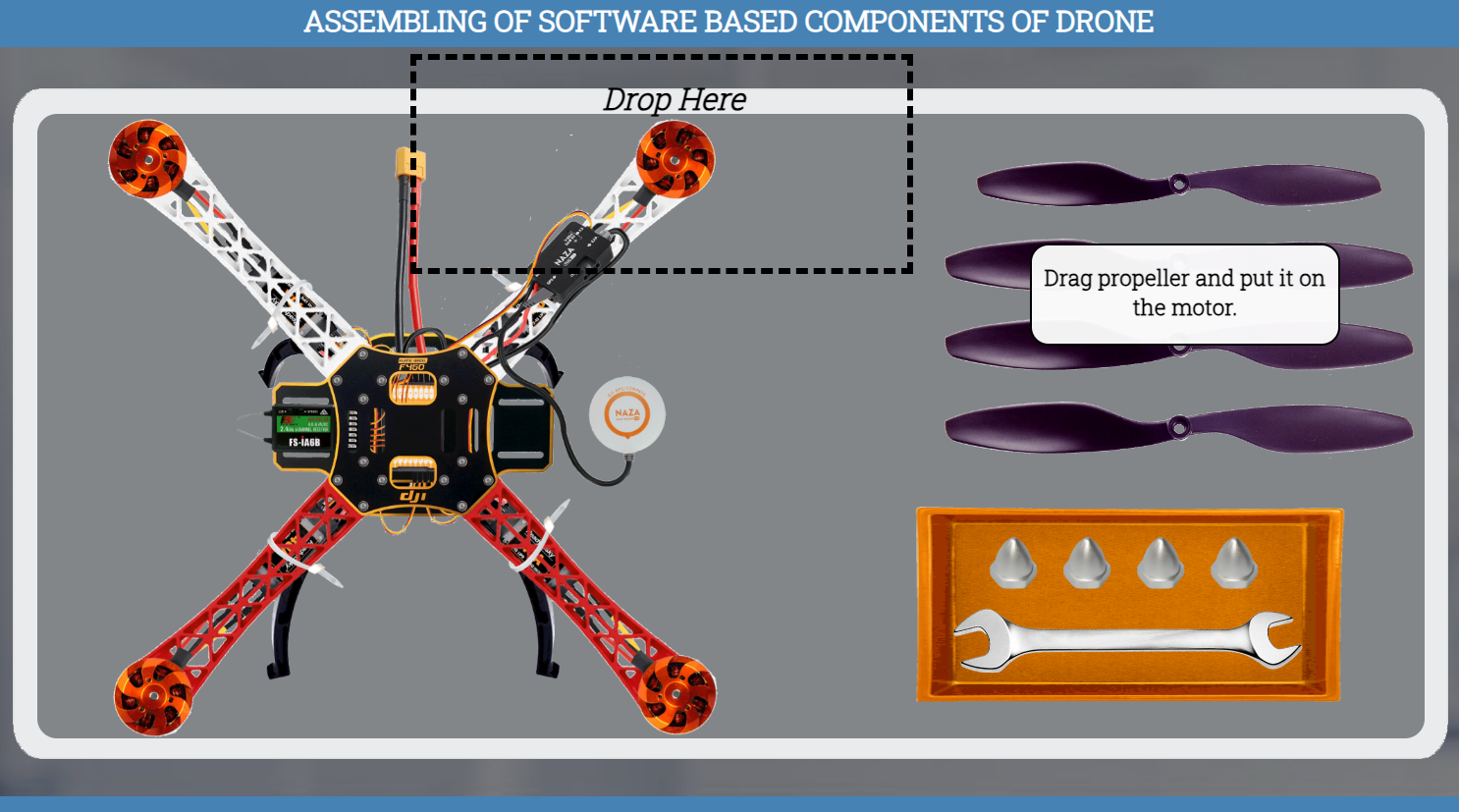
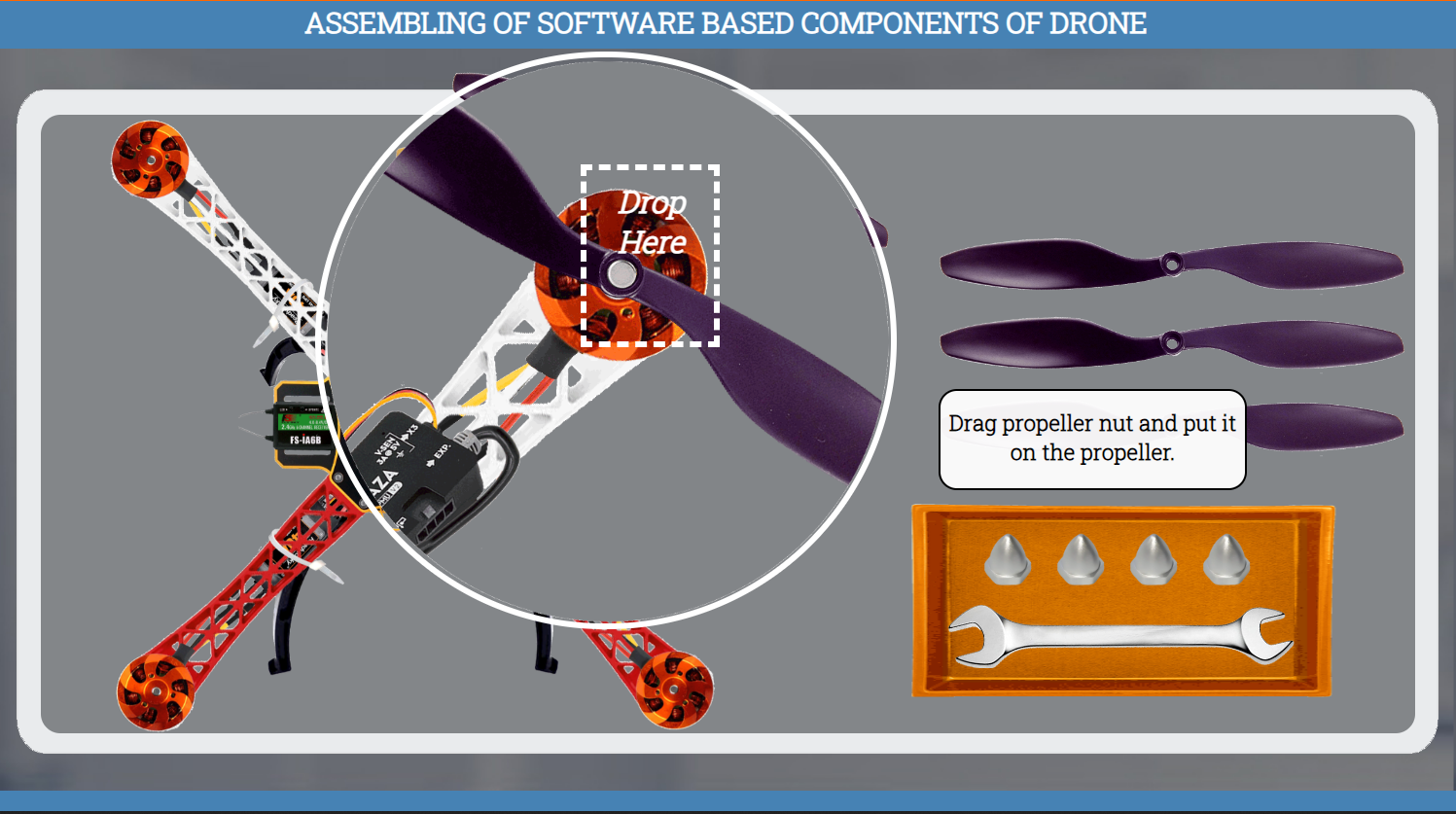
Drag propeller and put it on the motor.
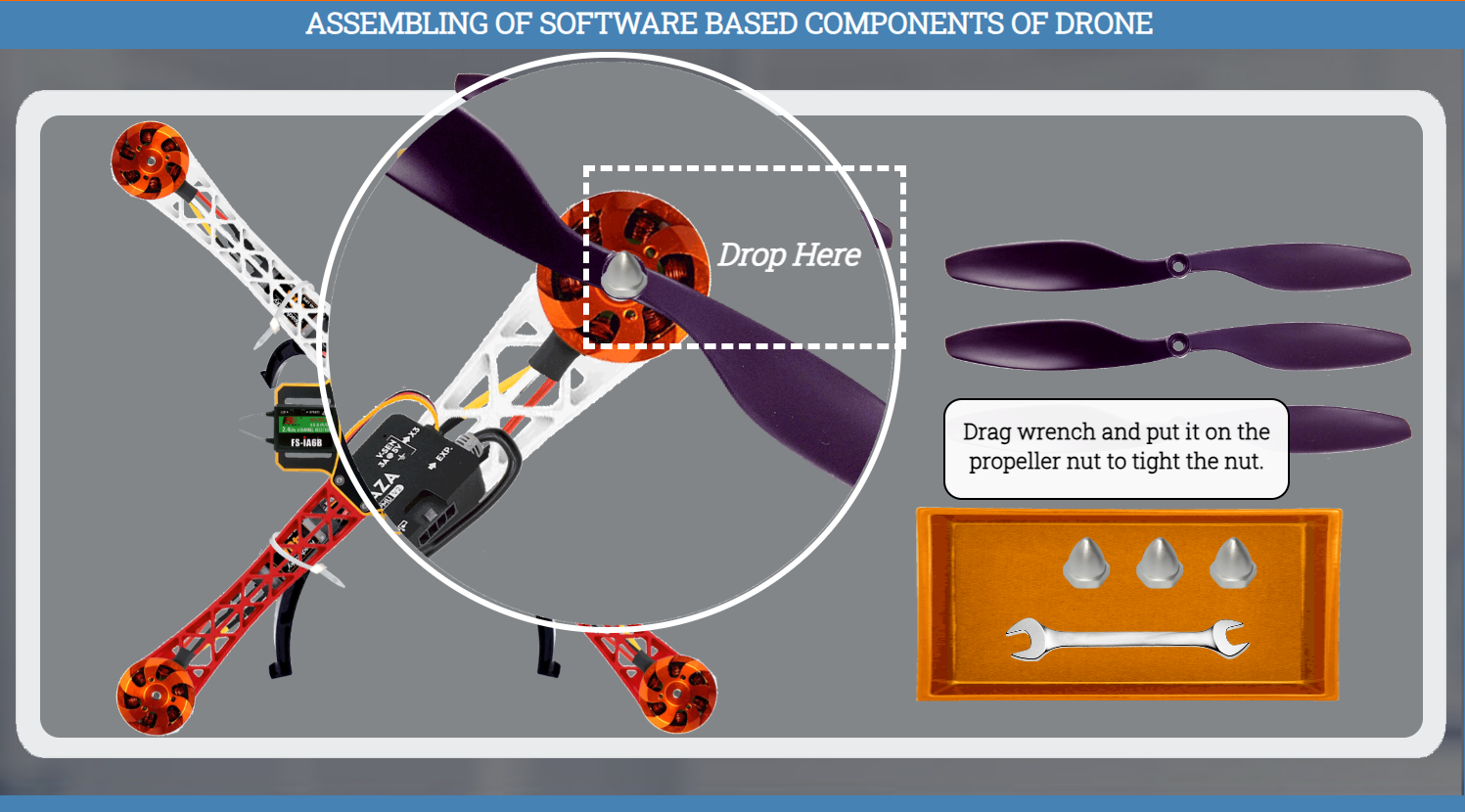
Drag propeller nut and put it on the propeller.
Drag wrench and put it on the propeller nut to tight the nut.
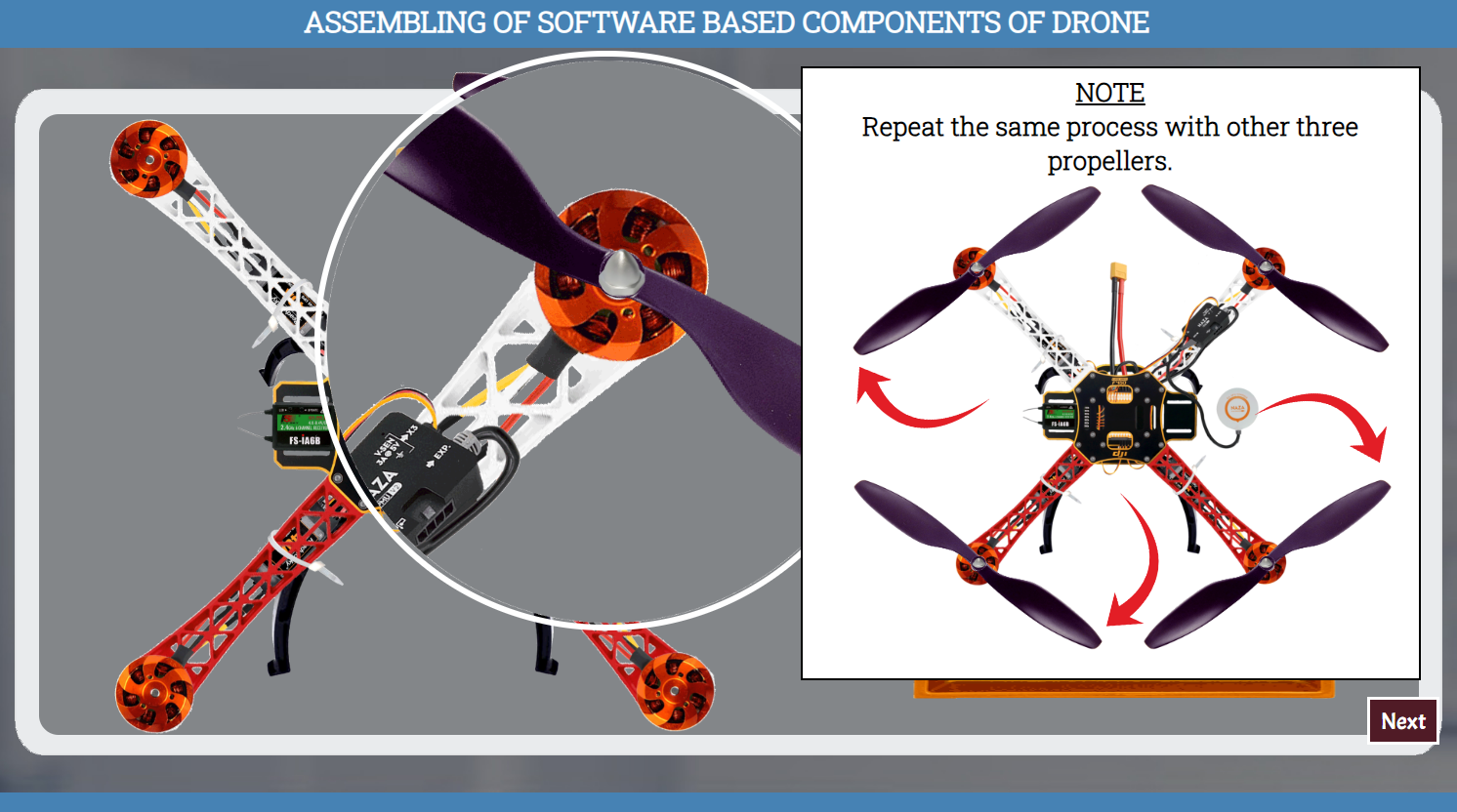
NOTE :Repeat the same process with other three propellers.
click the next button
Choose the option and click on the submit button
click the next button
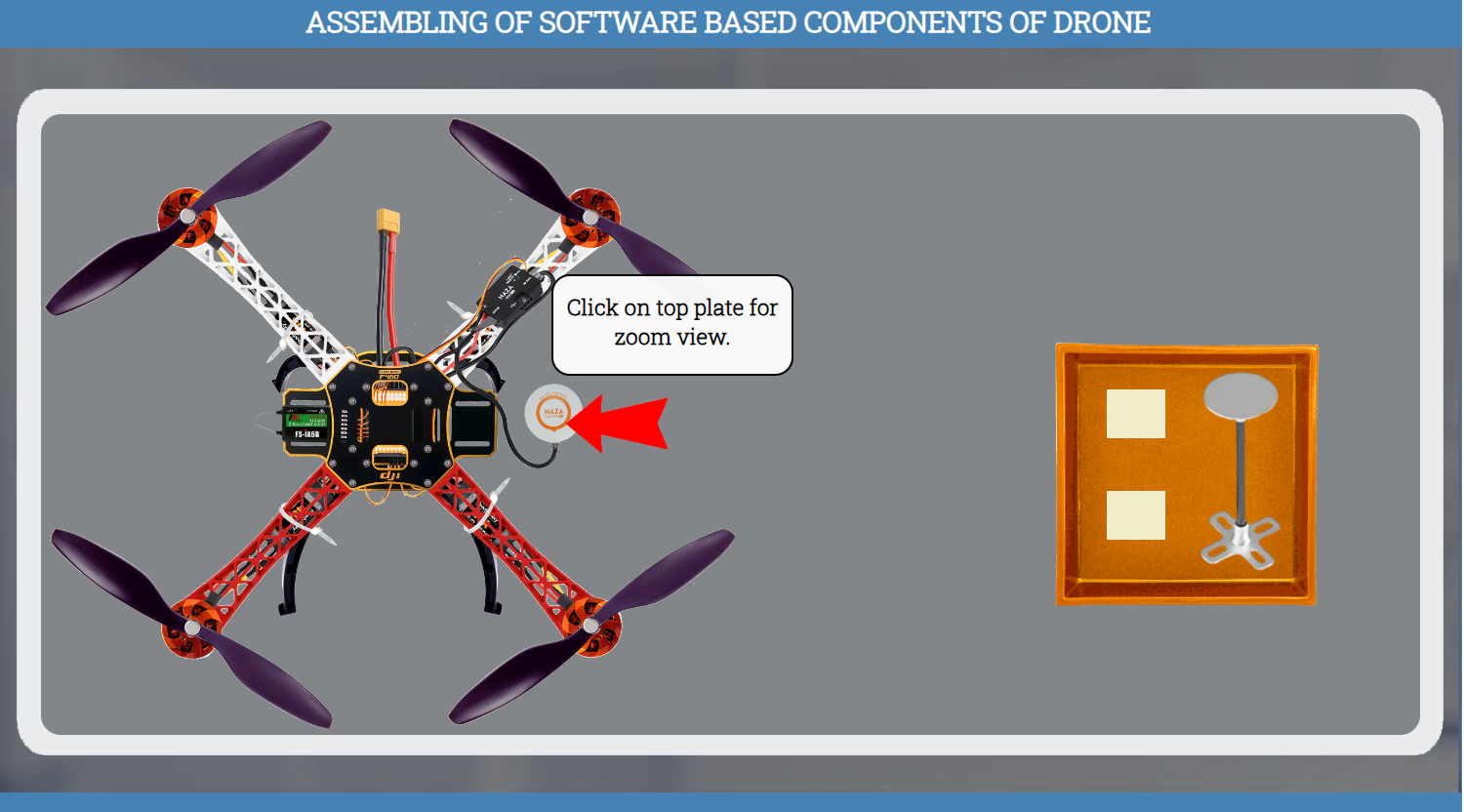
Click on top plate for zoom view.
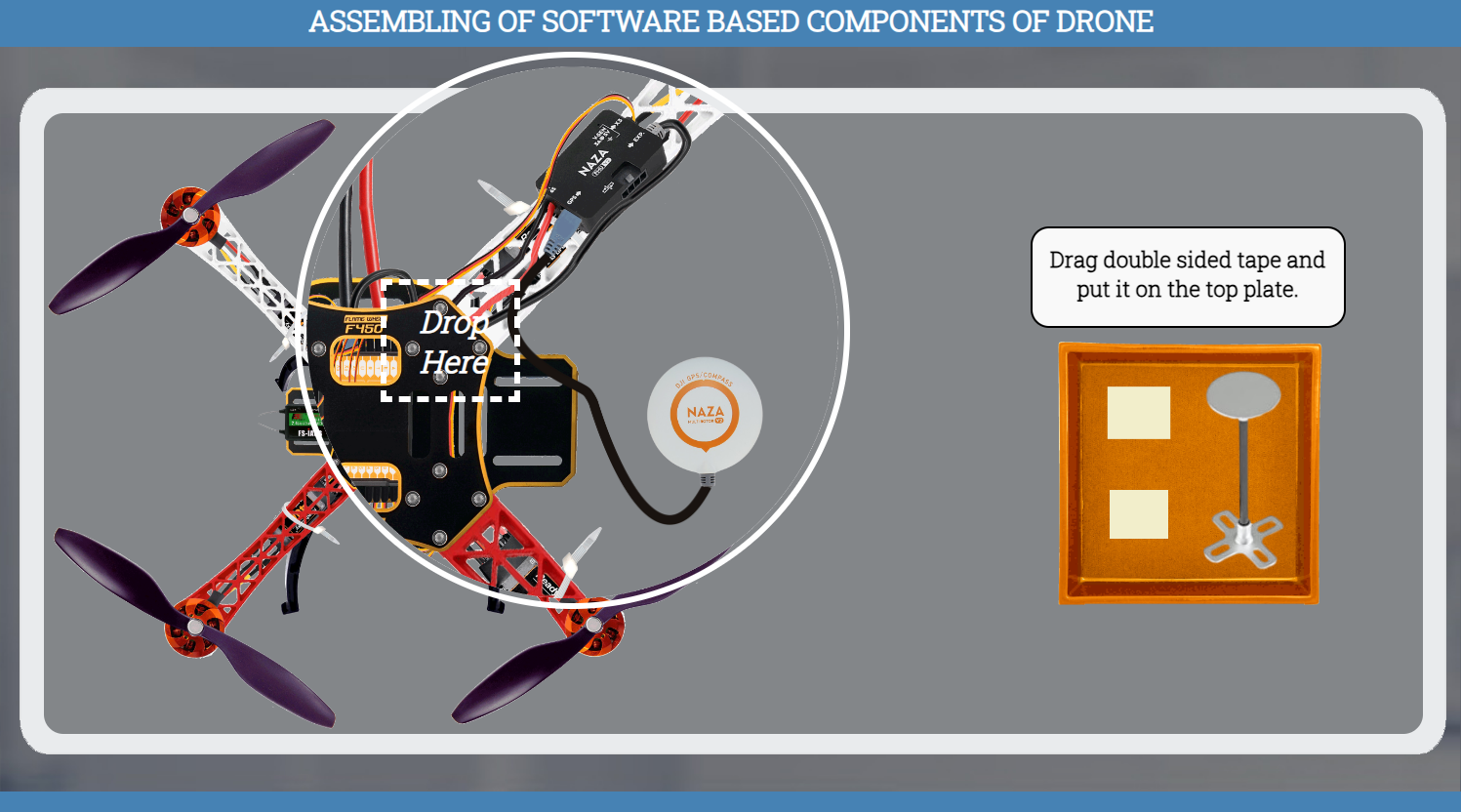
Drag double sided tape and put it on the top plate.
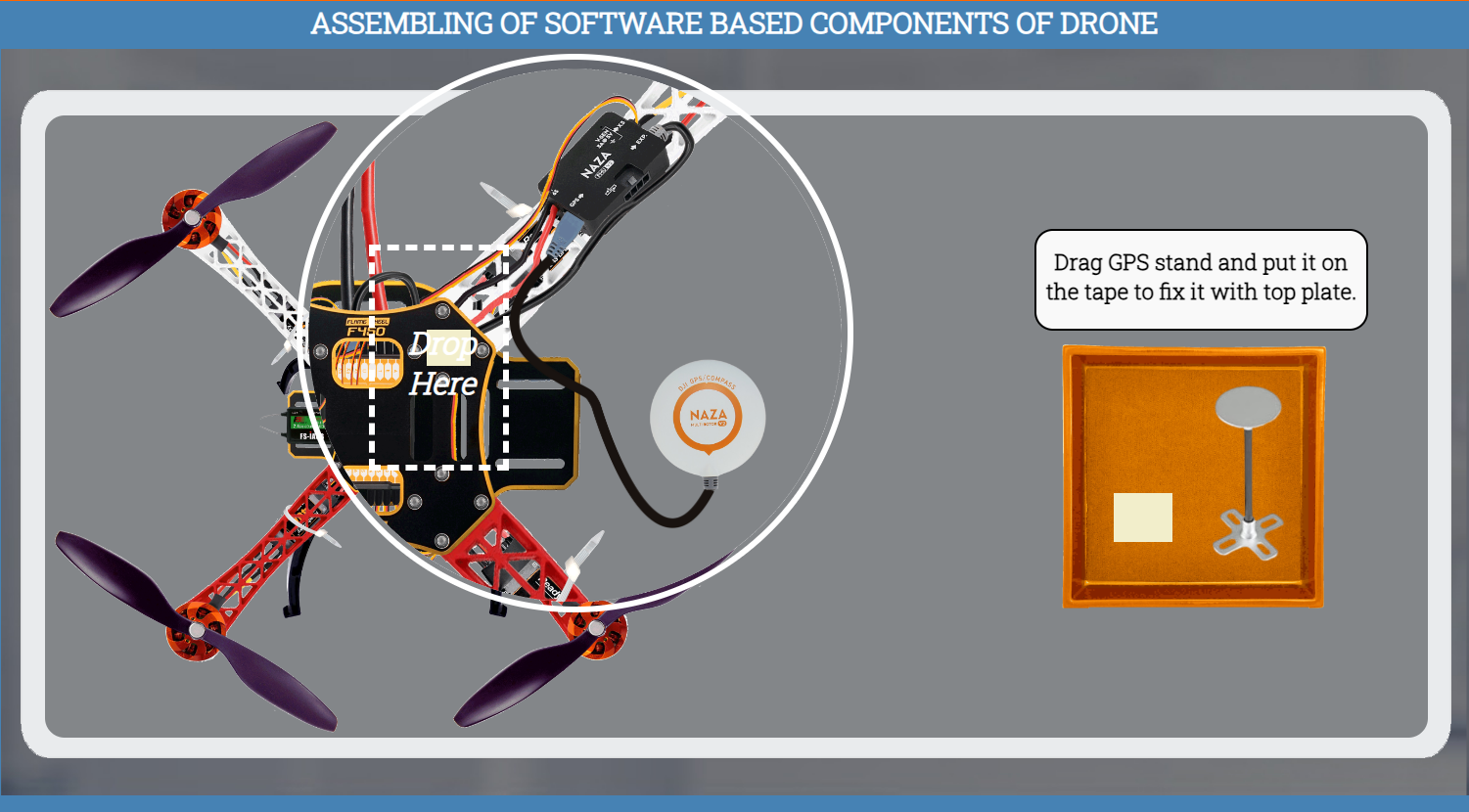
Drag GPS stand and put it on the tape to fix it with top plate.
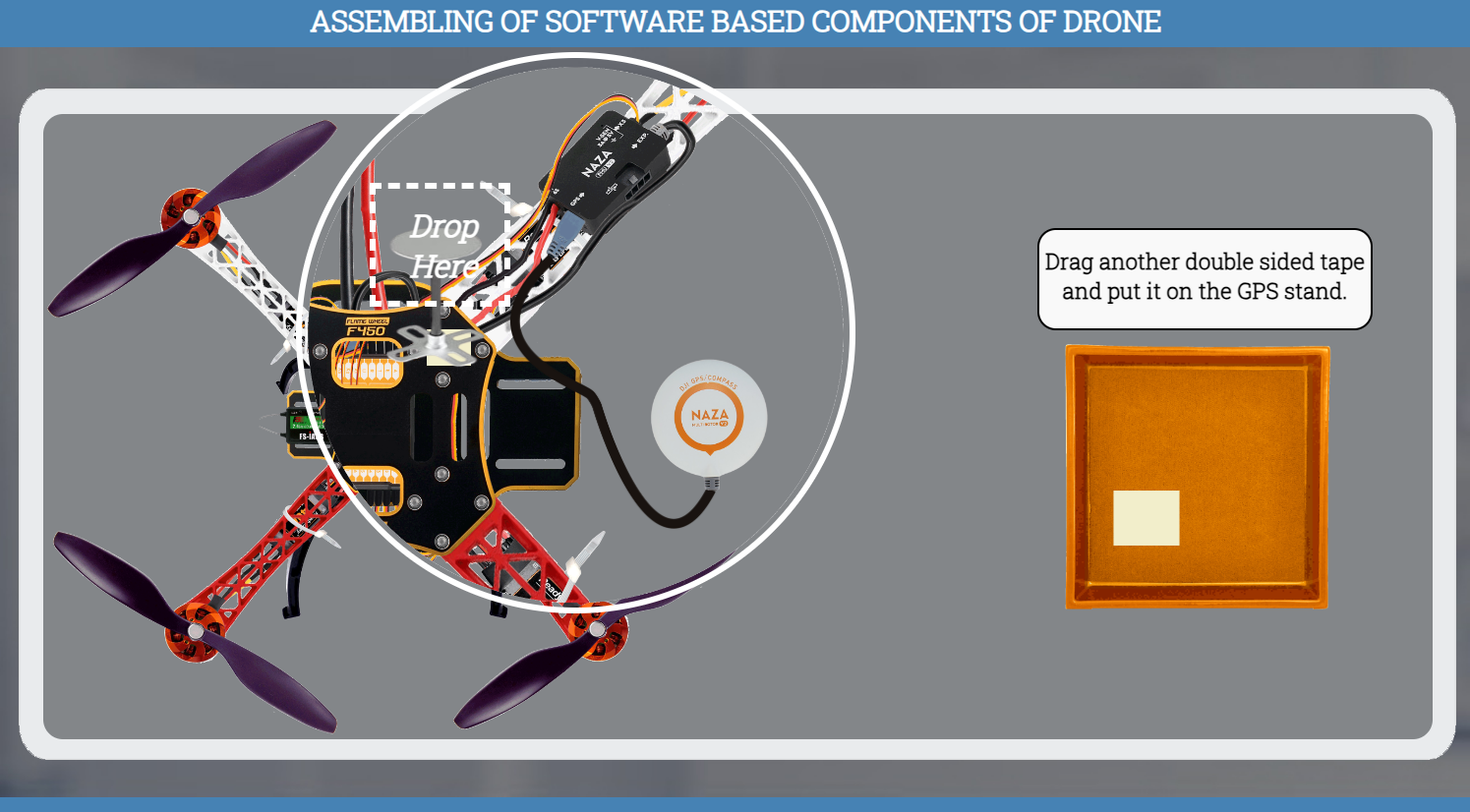
Drag another double sided tape and put it on the GPS stand.
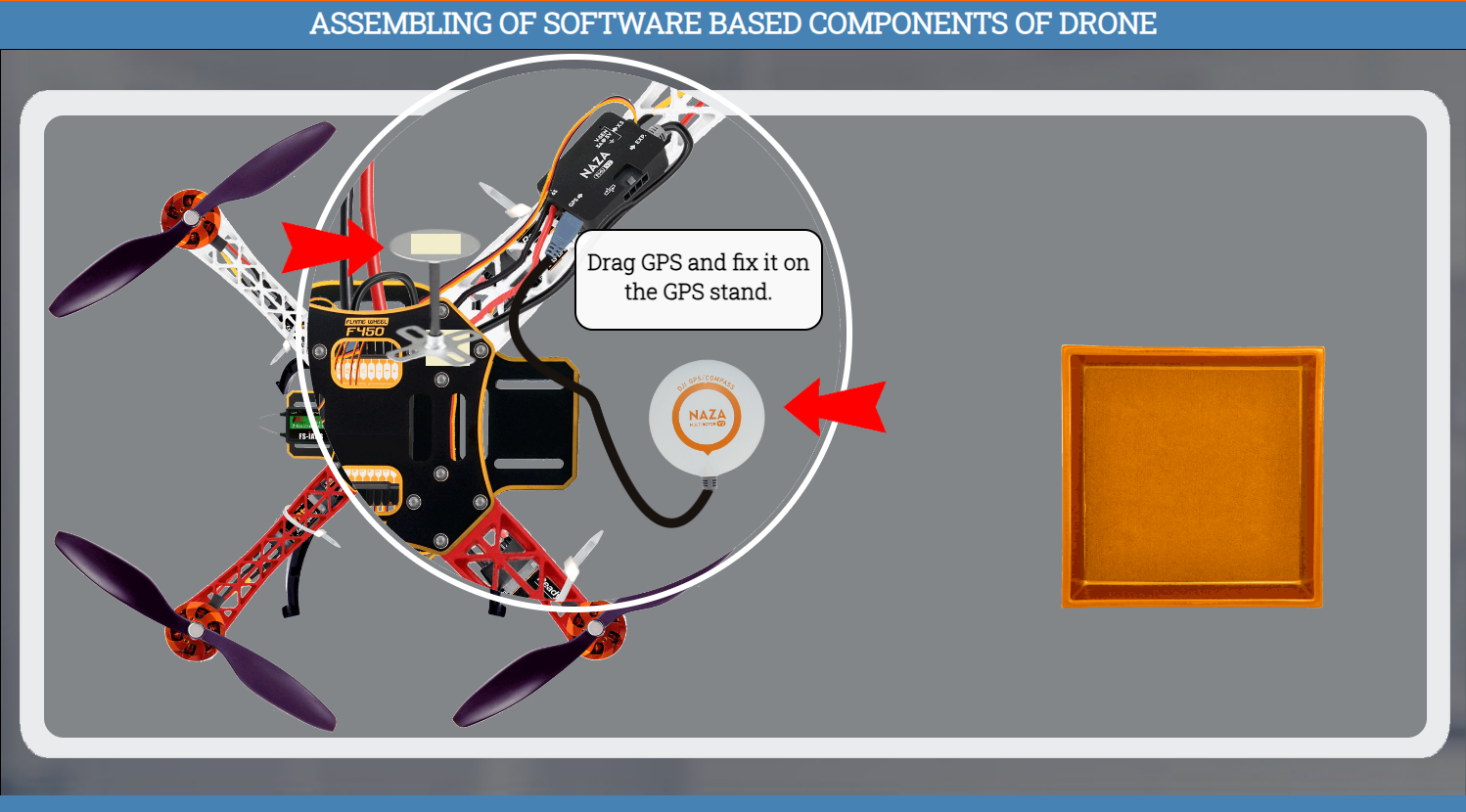
Drag GPS and fix it on the GPS stand.
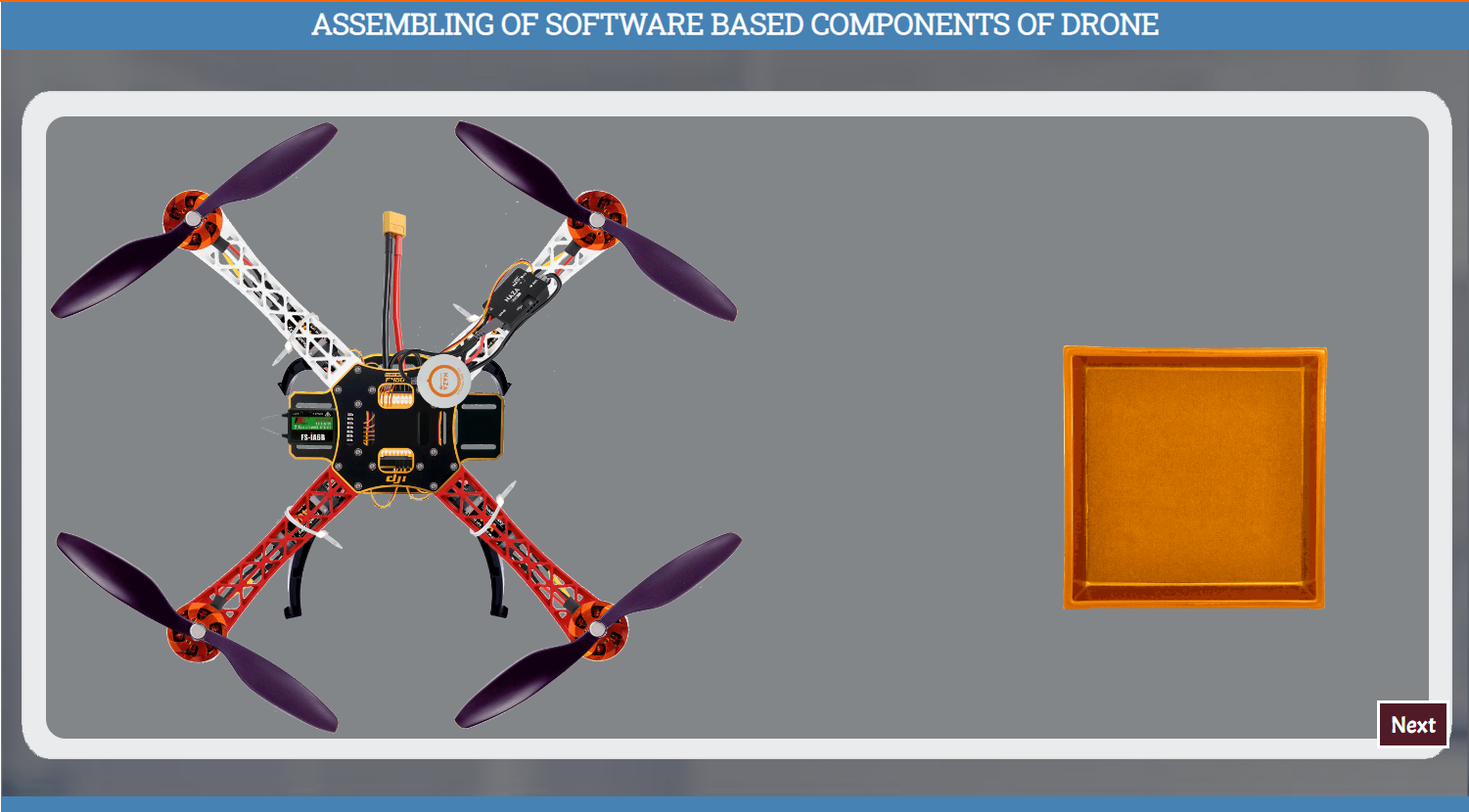
click the next button
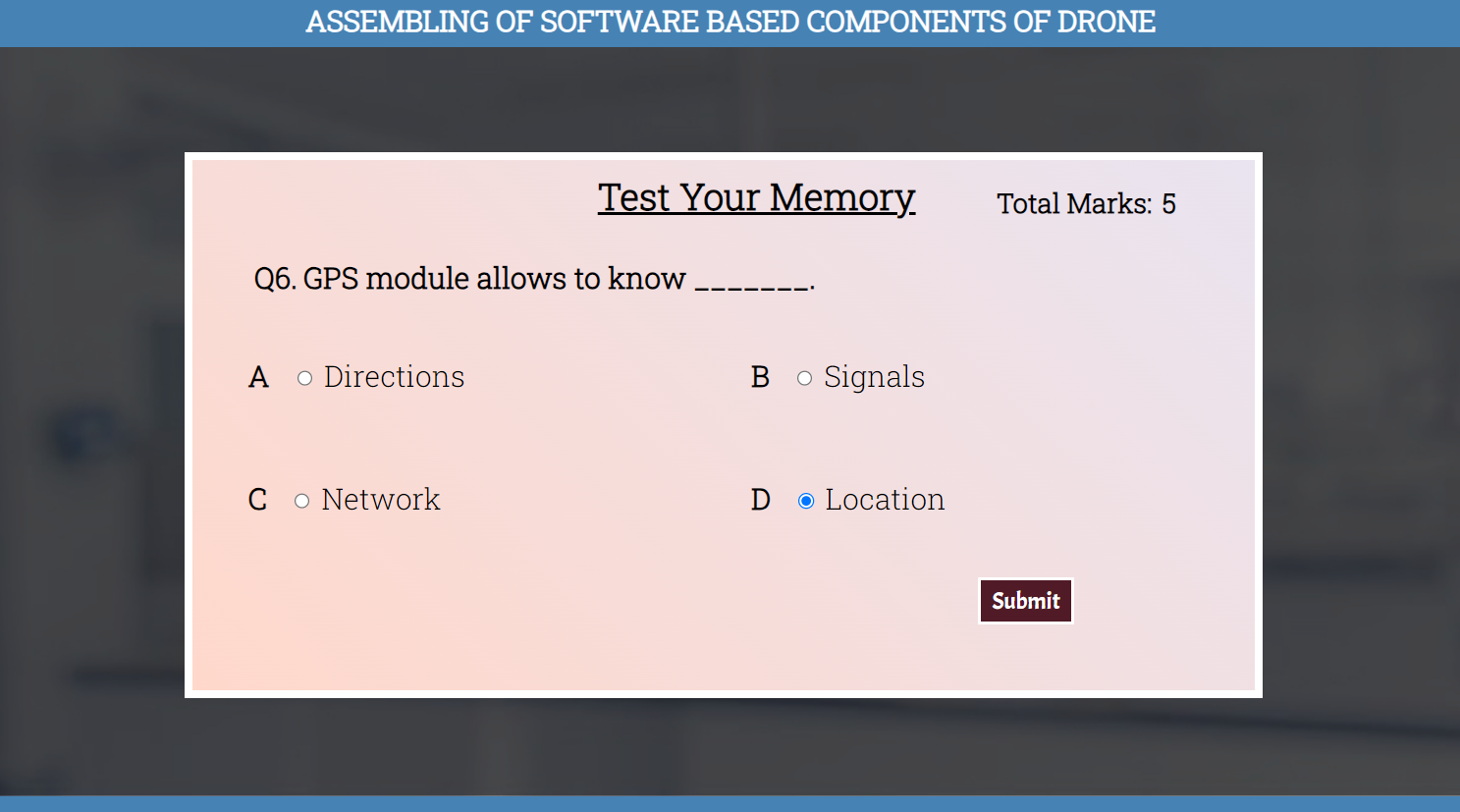
Choose the option and click on the submit button
click the next button
Click on top plate for zoom view.
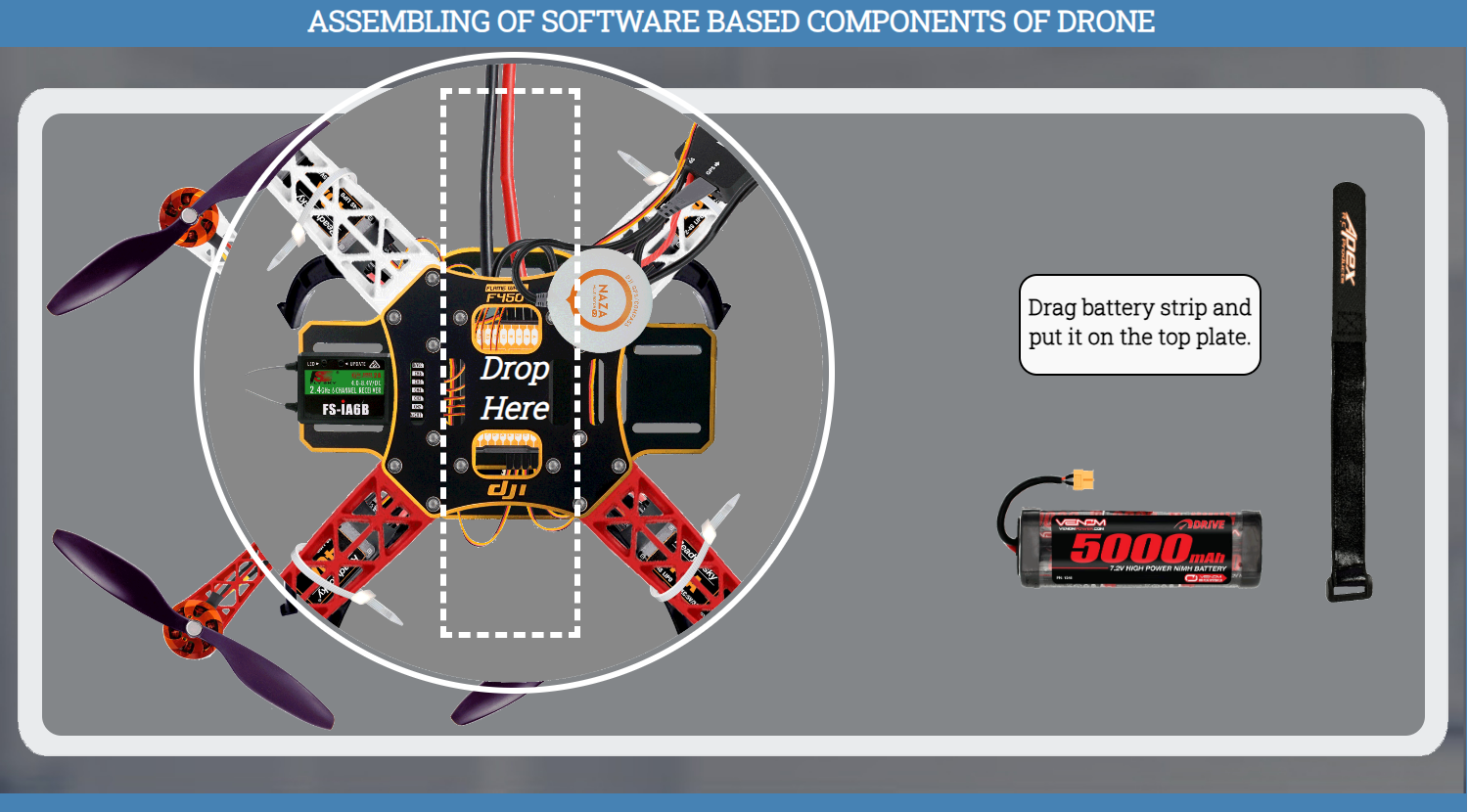
Drag battery strip and put it on the top plate.
click the ok button
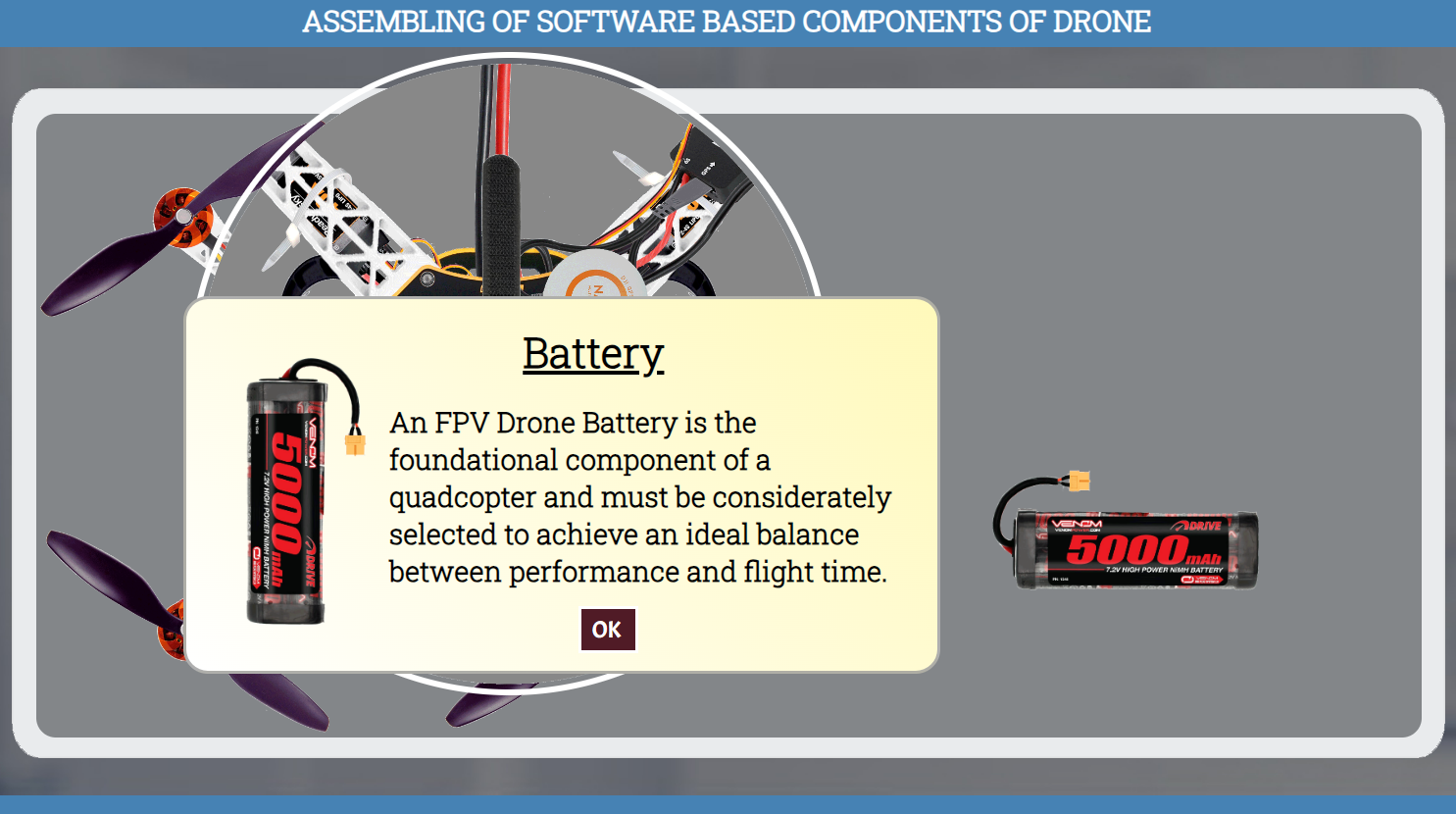
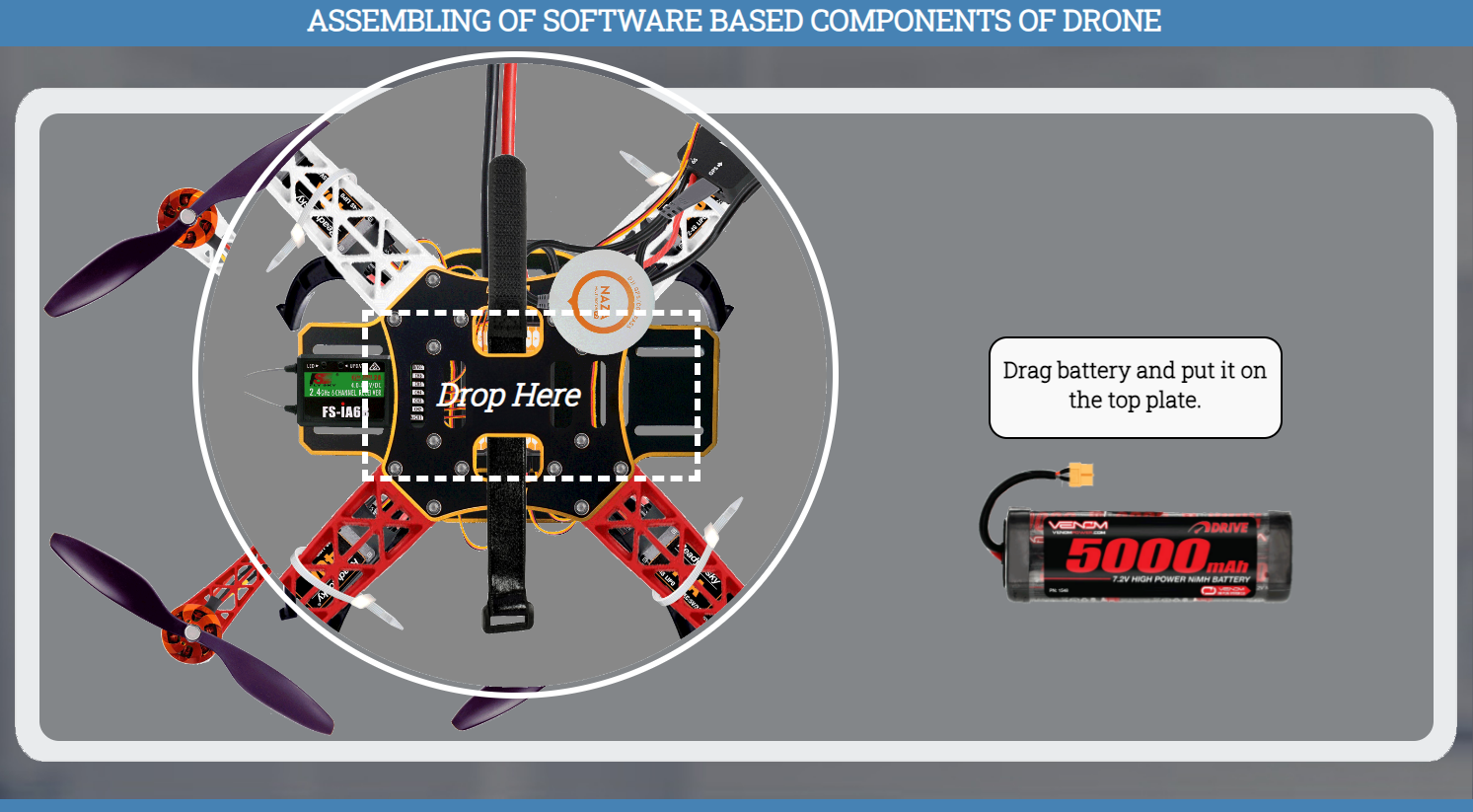
Drag battery and put it on the top plate.
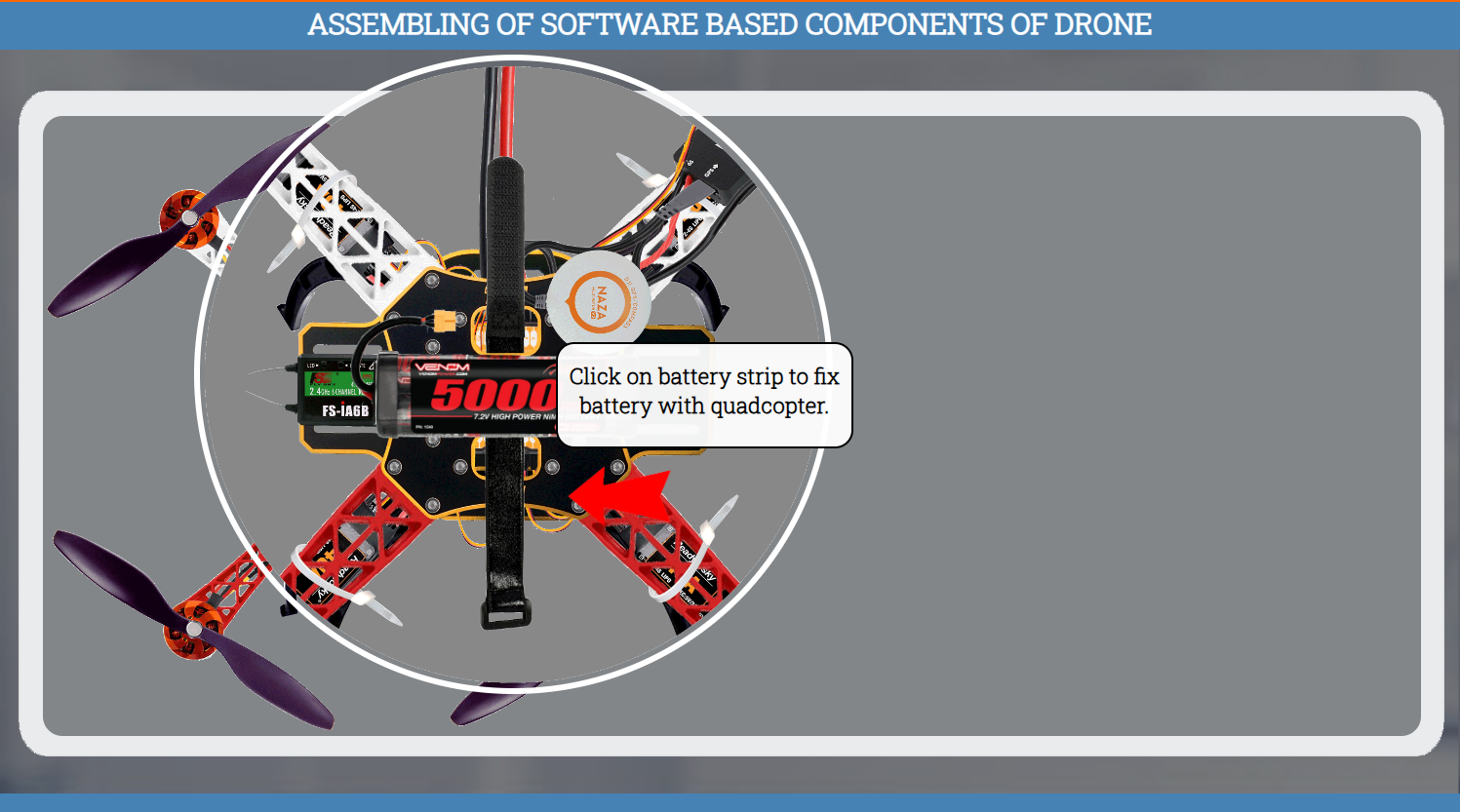
Click on battery strip to fix battery with quadcopter.
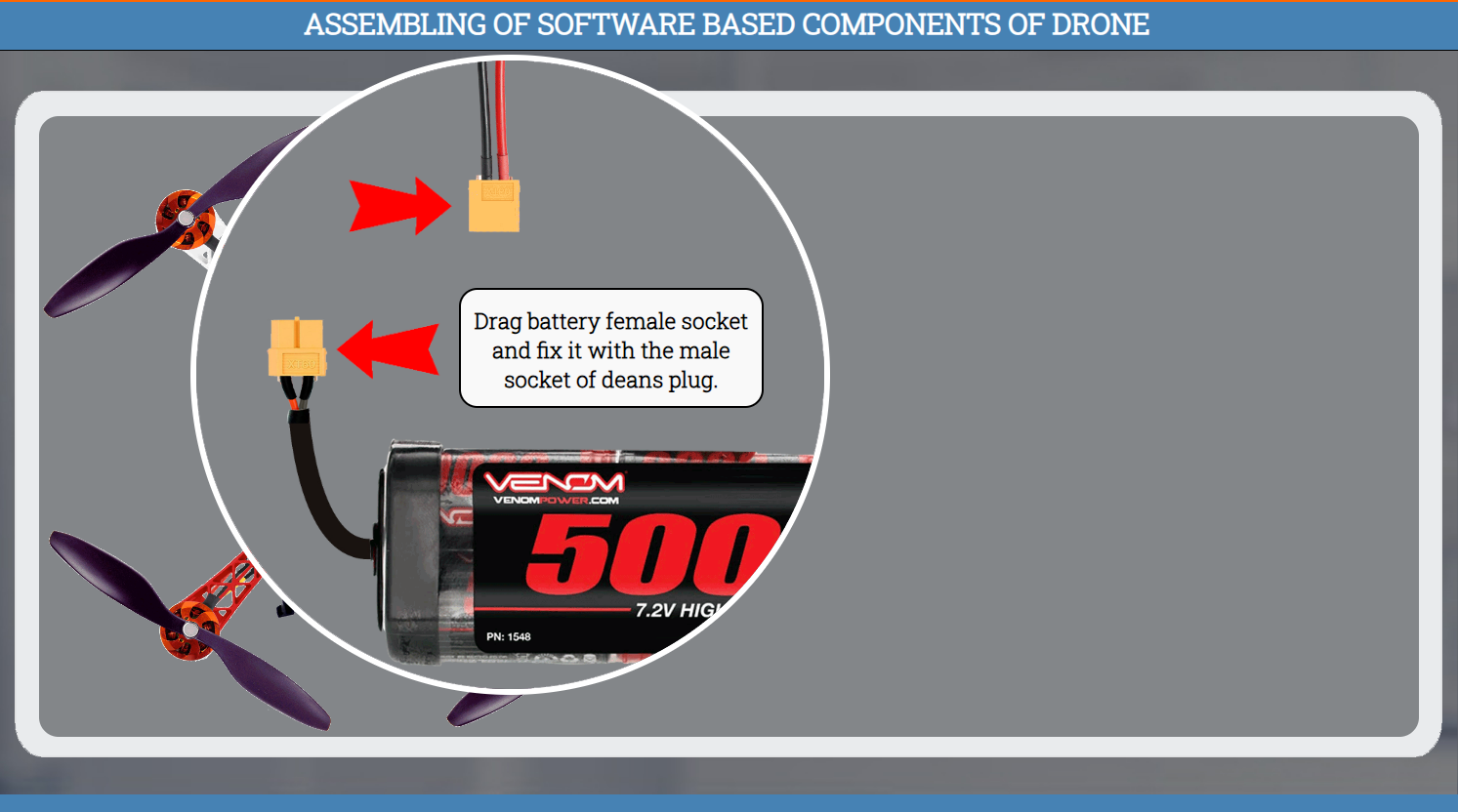
Drag battery female socket and fix it with the male socket of deans plug.
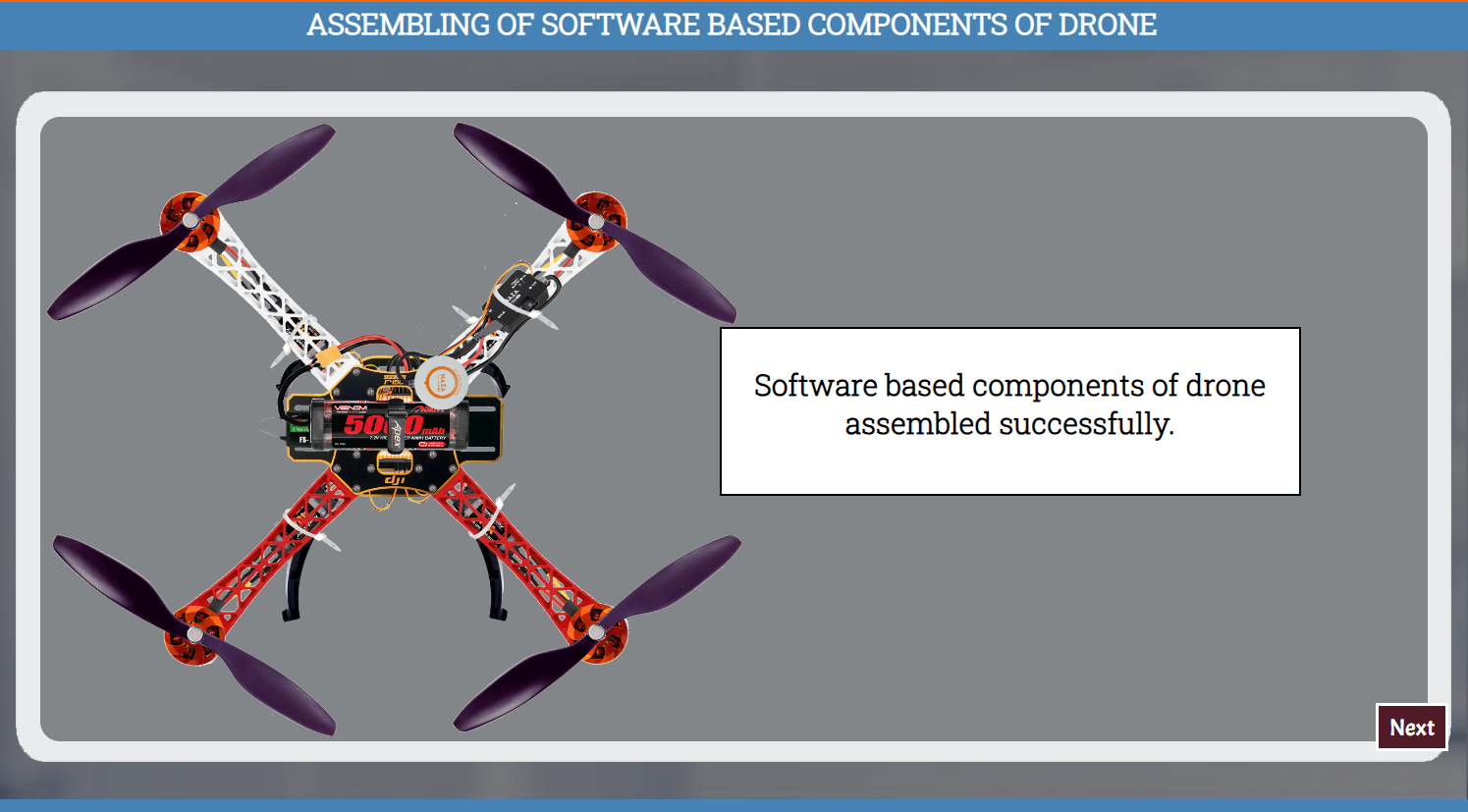
Software based components of drone assembled successfully.
click the next button
Thank You For Performing the Experiment