Volume estimation using aerial LiDAR
Objective:
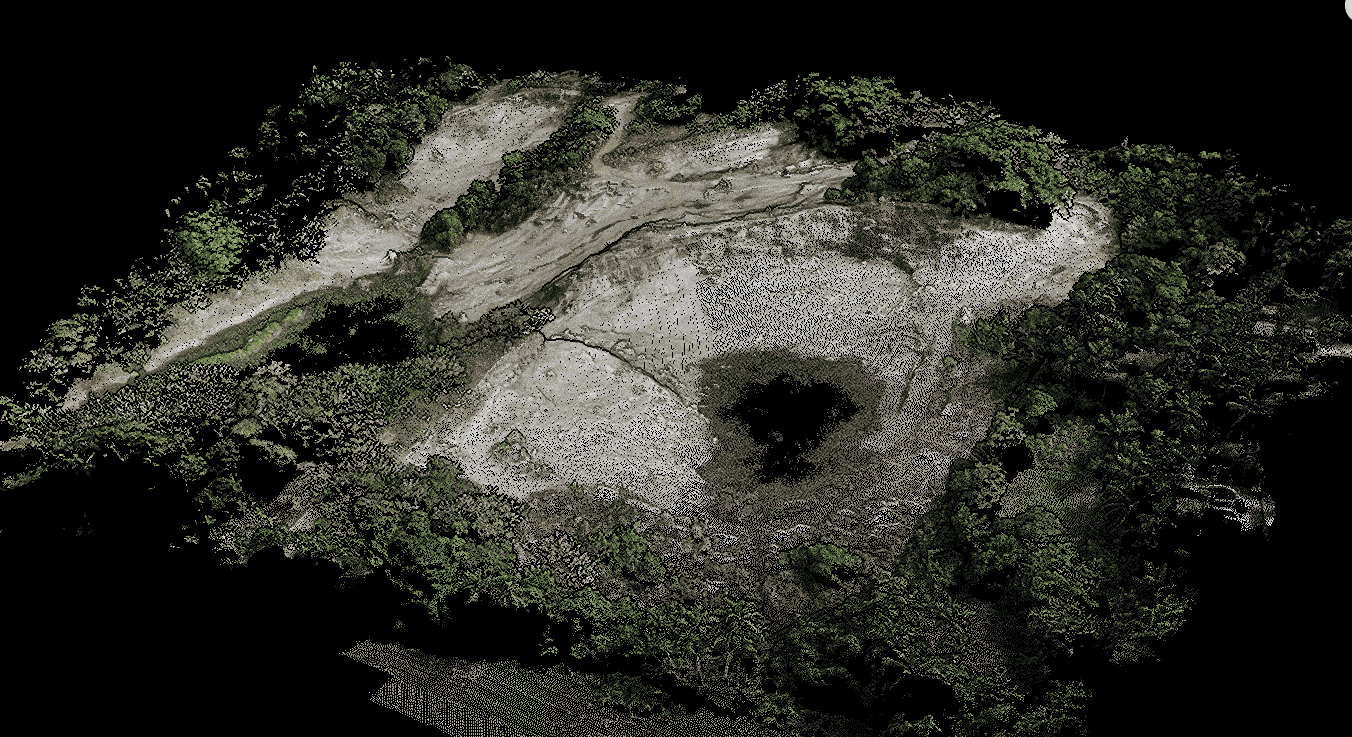
To set up a drone with a LiDAR sensor, mission planning, and post-processing of the data to obtain the point cloud of the surveyed area and estimate the volume of the required region.
Apparatus used:
LiDAR Sensor, RTK with Battery, Tripod, Landing pad, Operating System etc.
Description
Drones are commonly used for taking cinematic shots, wedding shoots, and photography. As technology is advancing, using geo maps for surveys is widely in use. Google maps data is not precise enough and real-time. On the other hand, Satellite data is very costly. By using drones we can overcome the disadvantages of map data and satellite data. Drone photogrammetry involves capturing large volumes of 2D images over a geographical area and compiling them to create 3D topographical models.An orthomosaic is essentially a large map that is made up of smaller photos. Each aerial photo that a drone pilot captures is pinned to a geographic position. Photos need to have an overlap of at least 70 percent to create an accurate picture.






Set the drone and attach the LiDAR Sensor and place it on the landing pad.



Note:- Unfold the landing pad.
Setup Real Time Kinematic (RTK) device: Place the tripod in the open sky and mount the RTK device with a stick on the tripod.






Note:- Make sure the tripod is leveled and the water bubble is at the center.


Insert the battery into the RTK and hold the power button for 3 sec to start RTK.
Open the flight plan choose the various parameters for the flight & start the mission.

Load the scanned files and images.





Loading!
Upload is completed!
Note:- Click on the upload button to process the captured data.
Note:- Click on the check button of Upload, to process the captured data.
Note:- Click on the check button of Upload, to process the captured data.
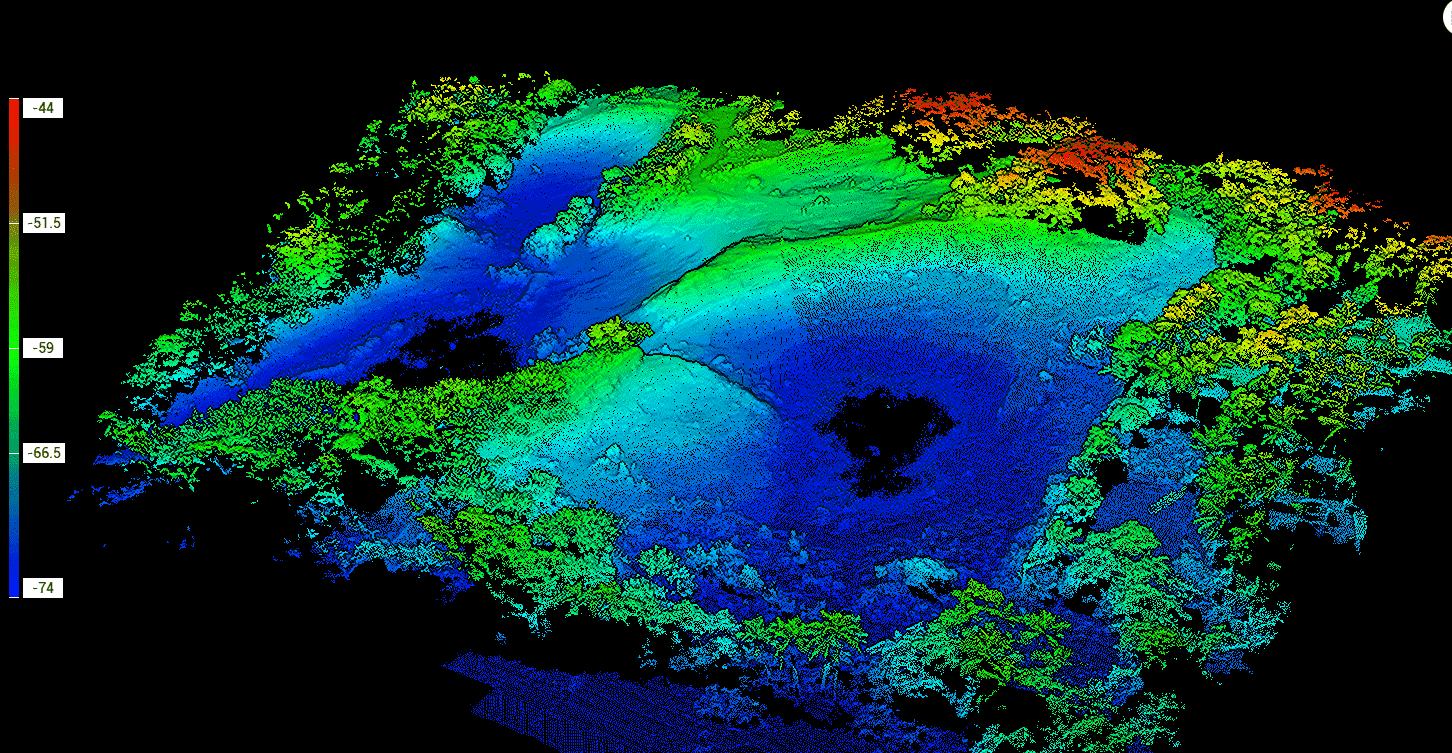
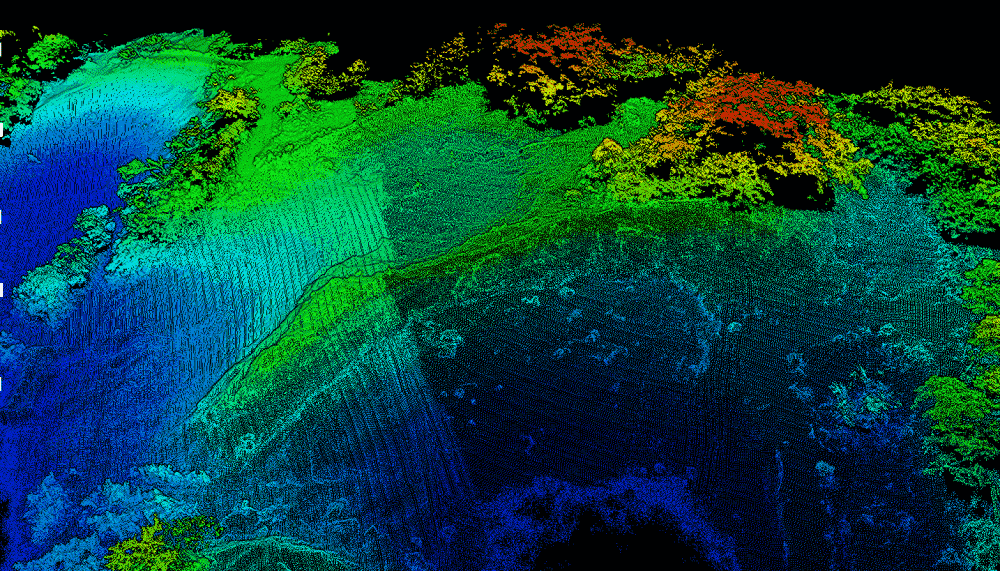
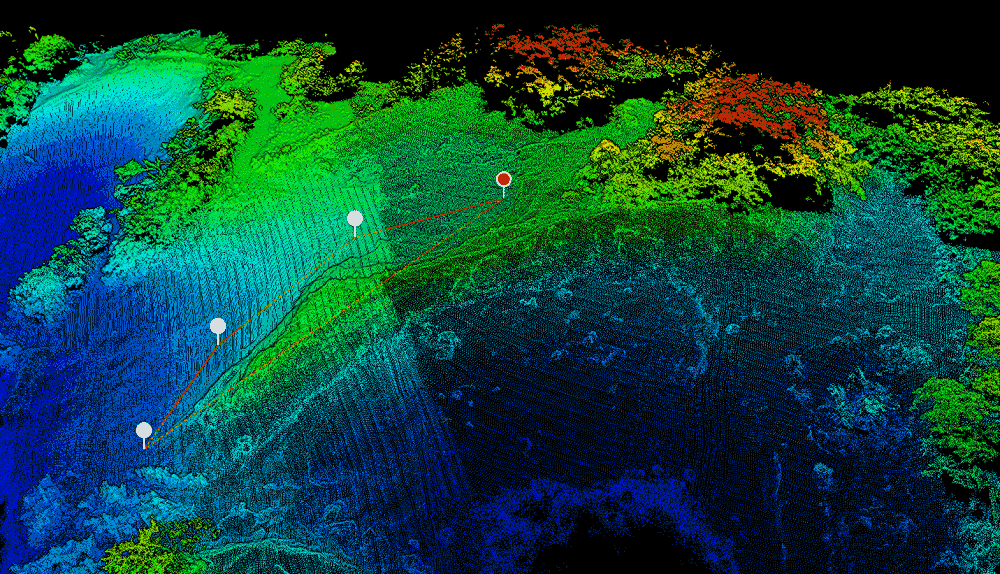
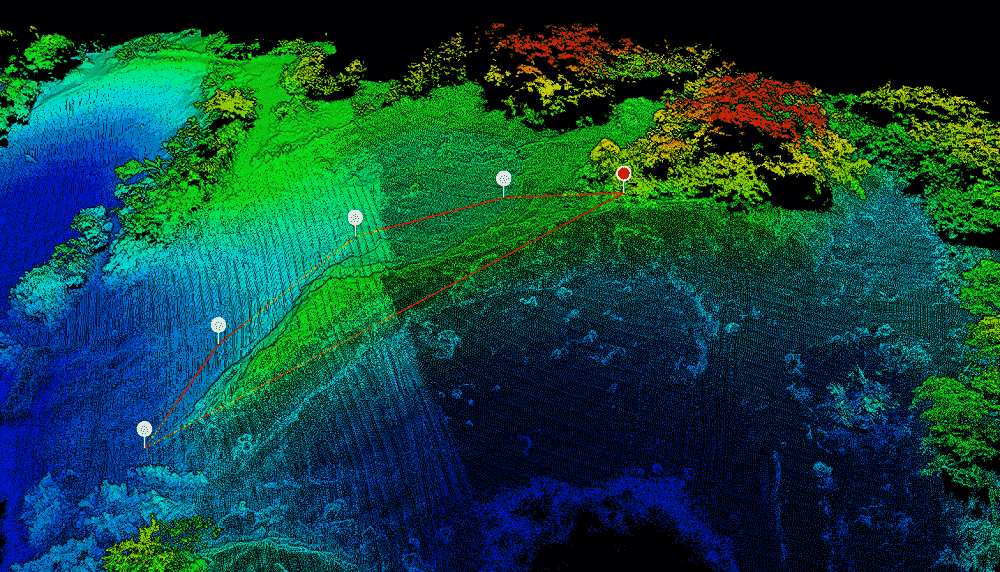
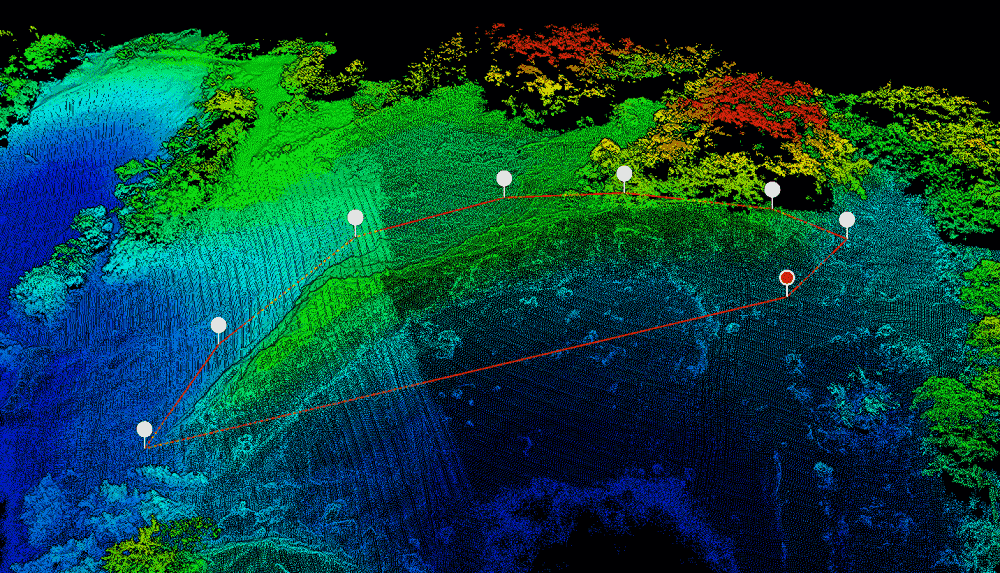
Choose output settings and process data to obtain point cloud.
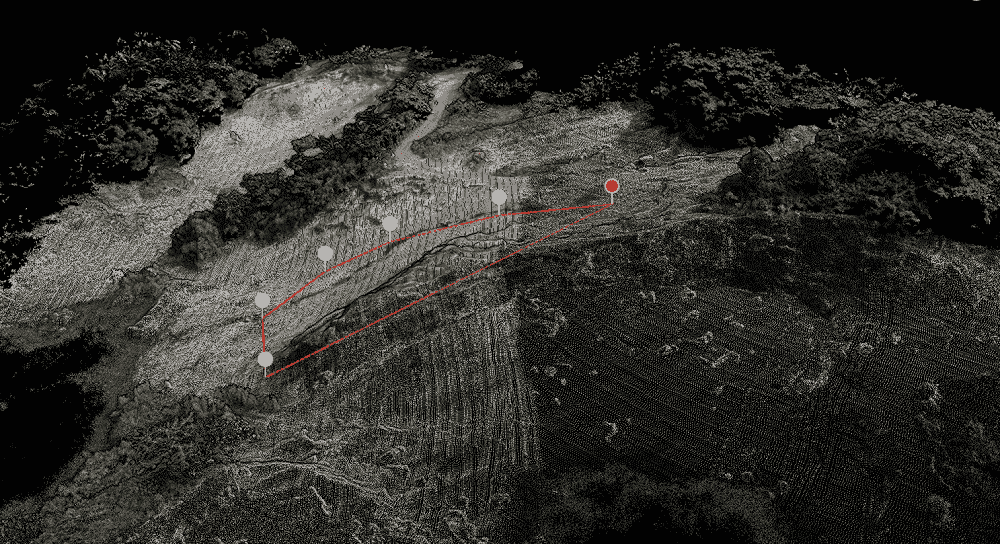
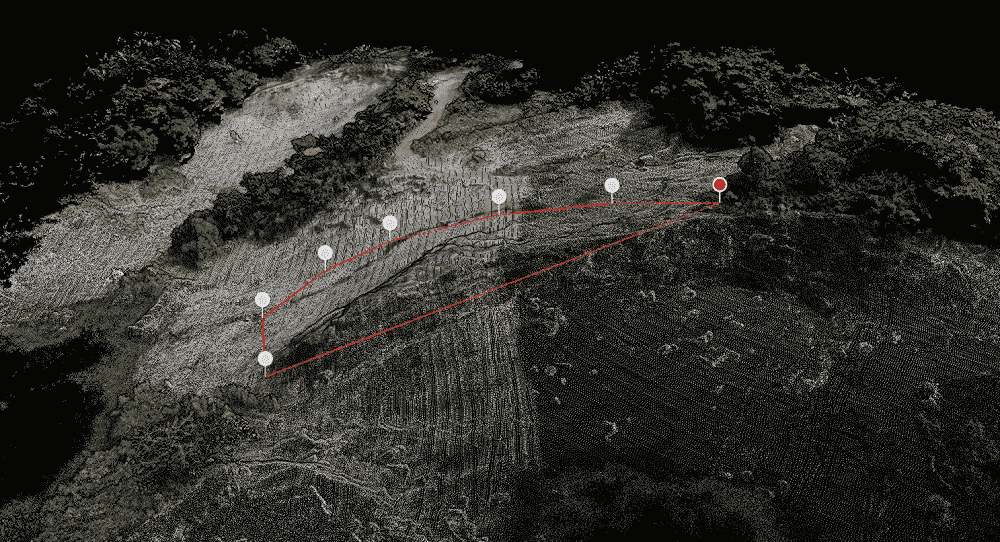
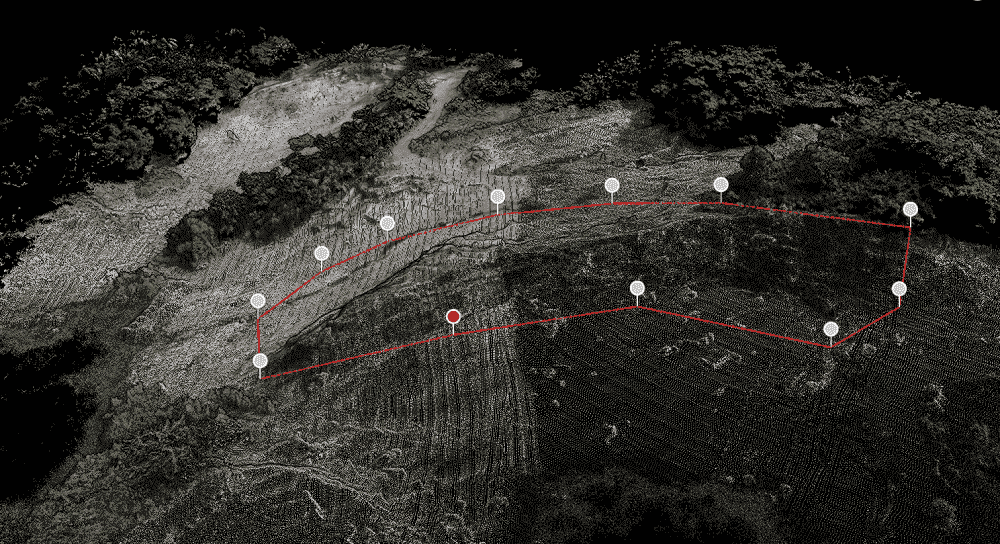
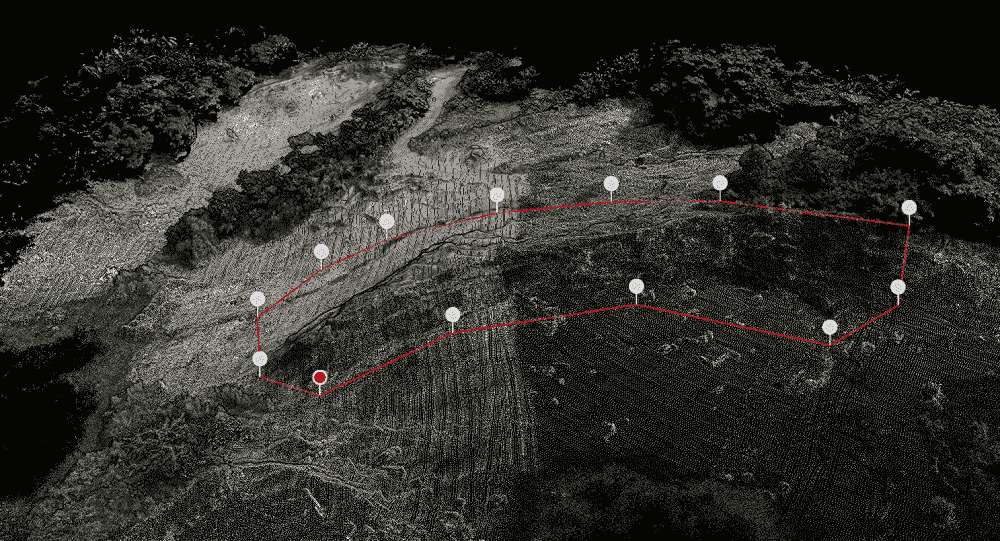
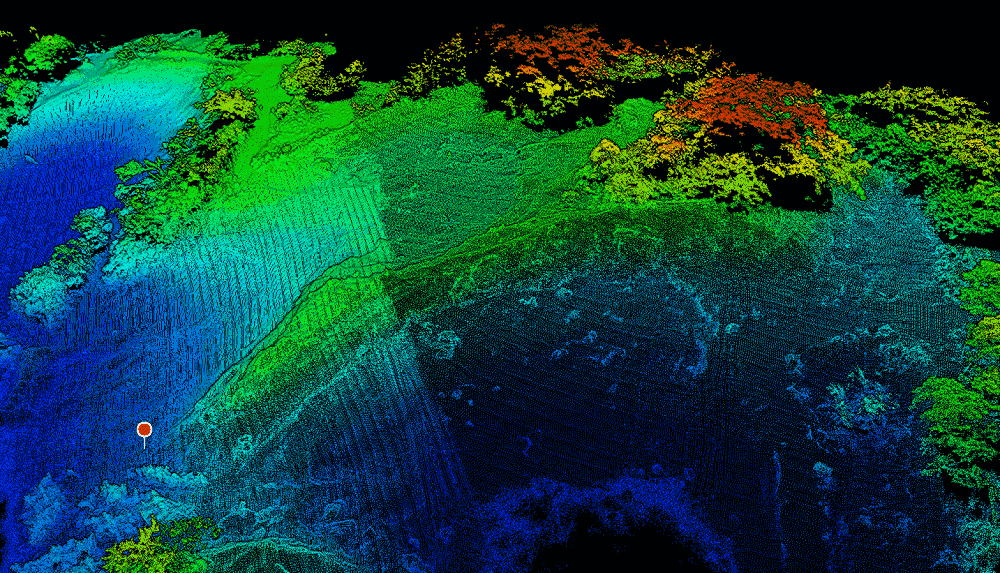
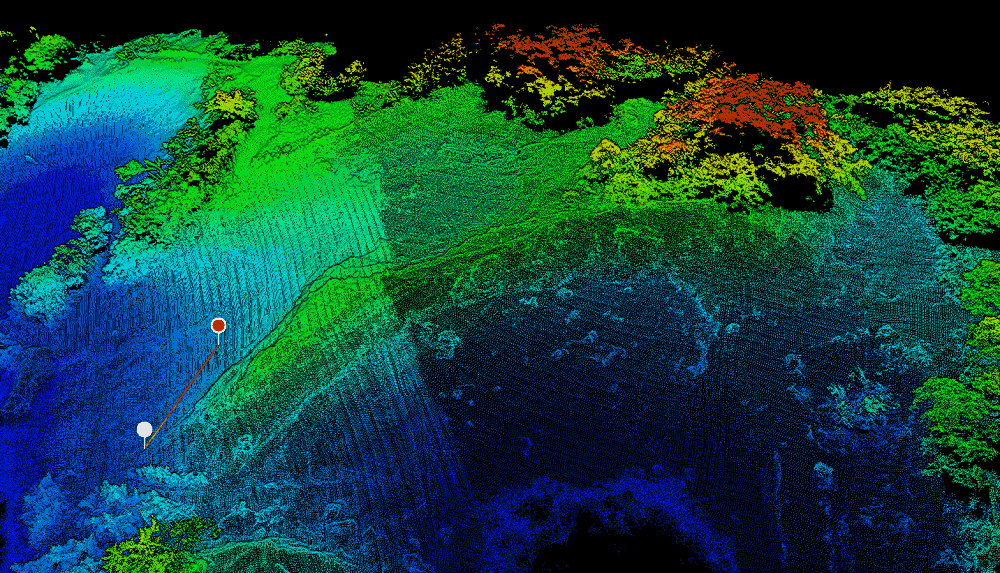
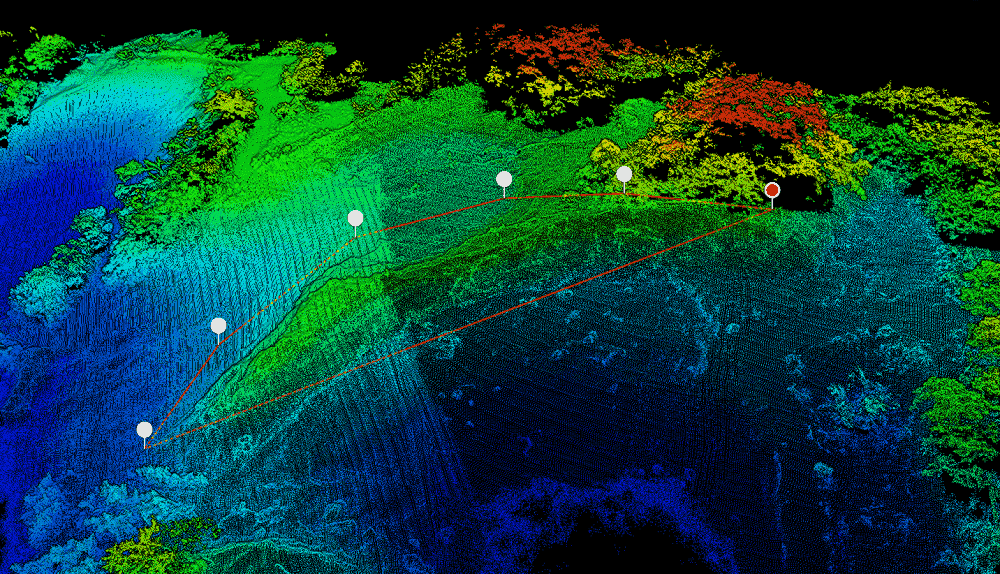
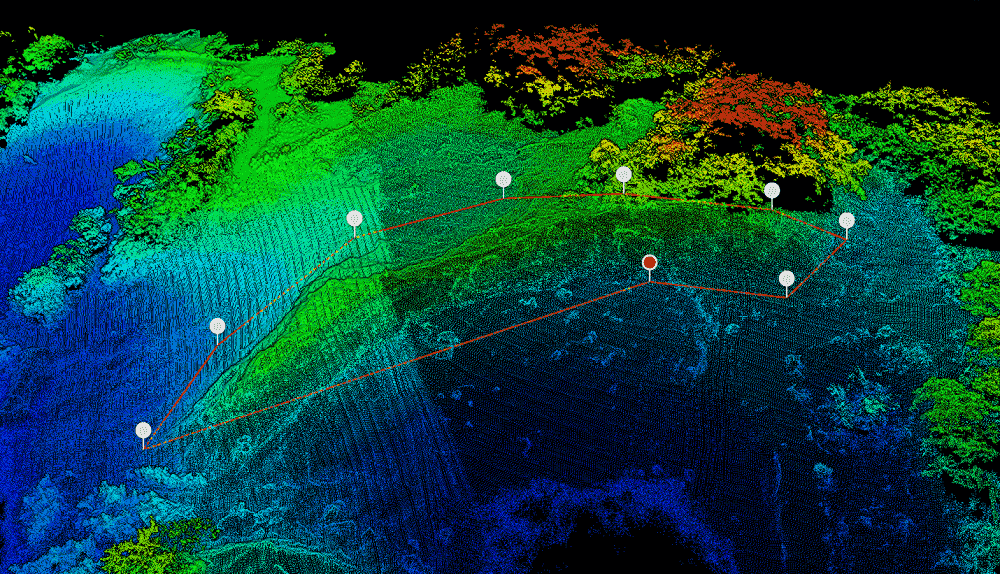
Select the required boundary and find the volume of the boundary region.

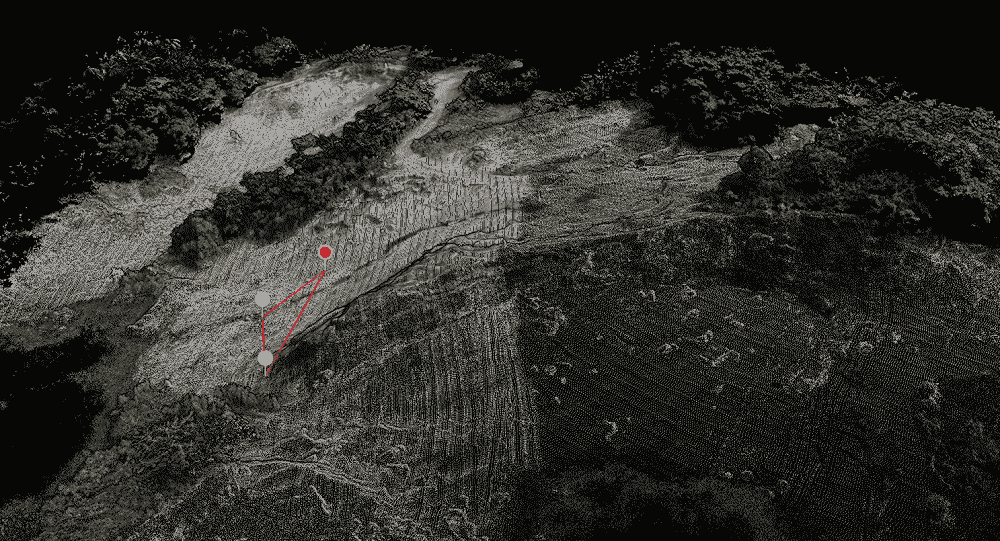
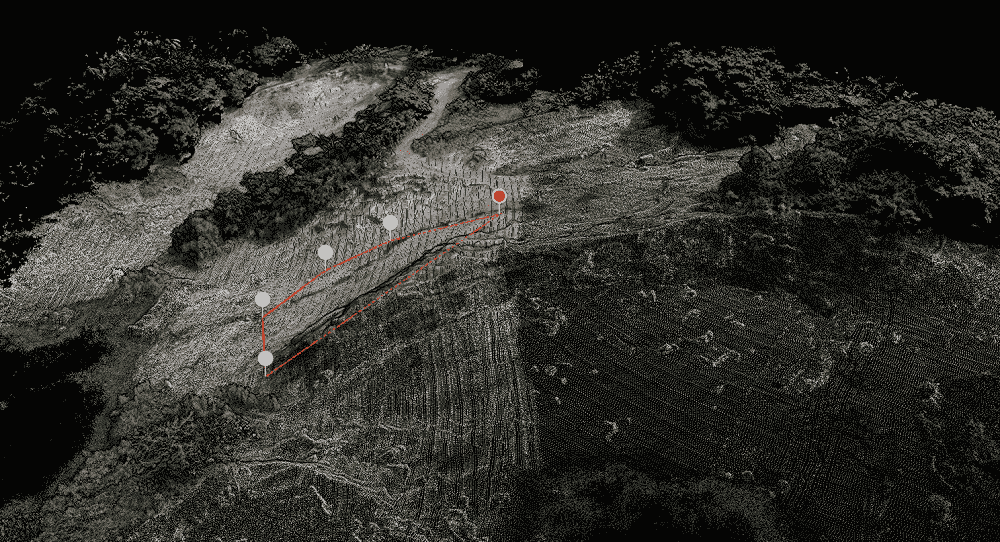
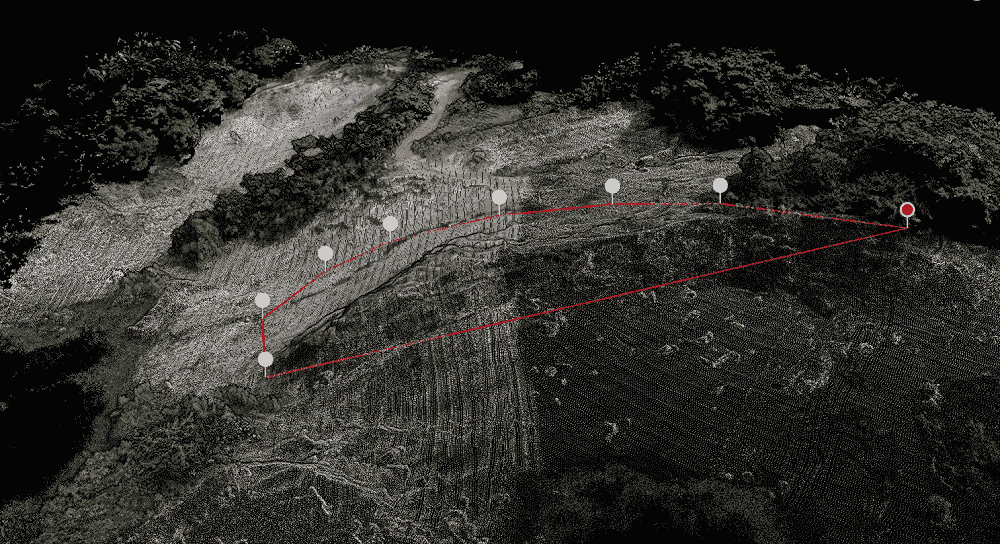
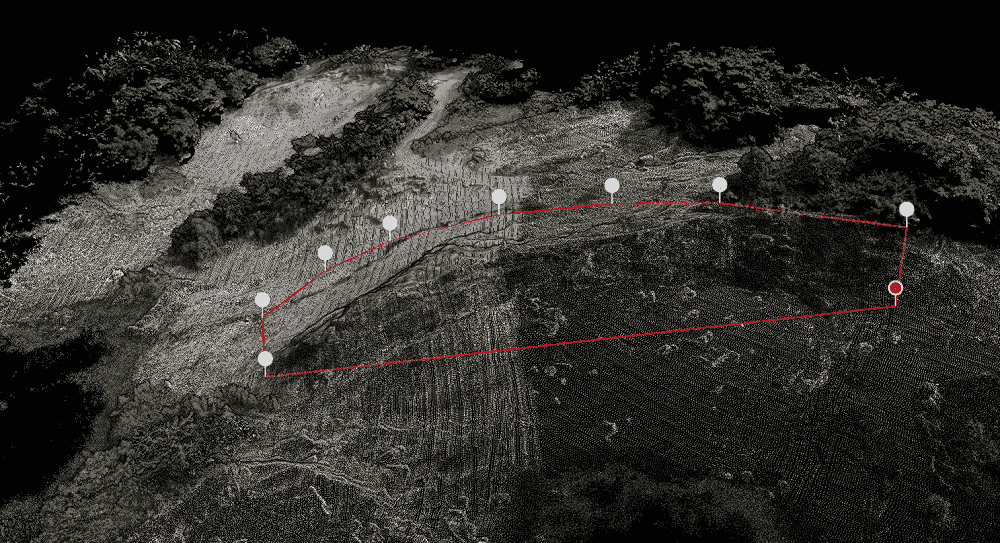
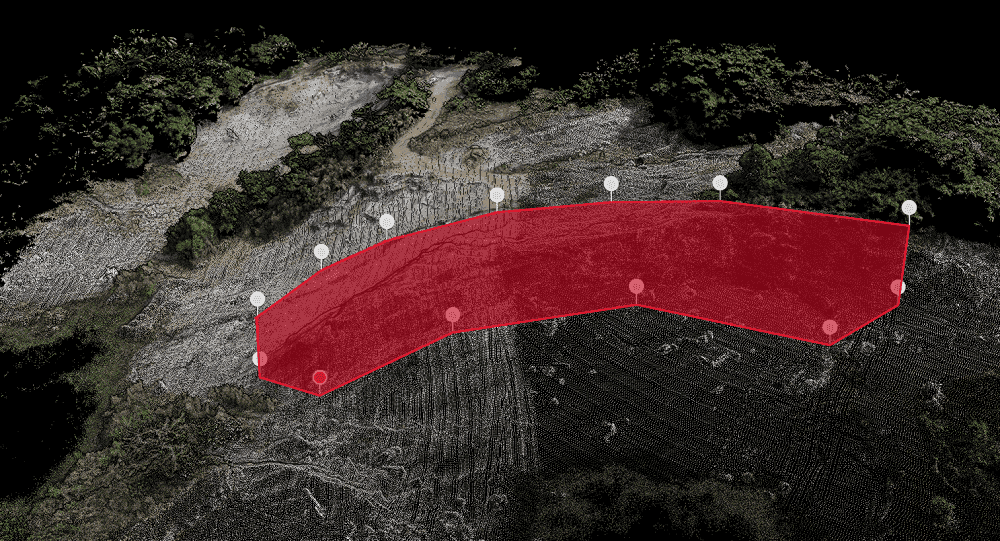
Cut volume: 22578.89 m3
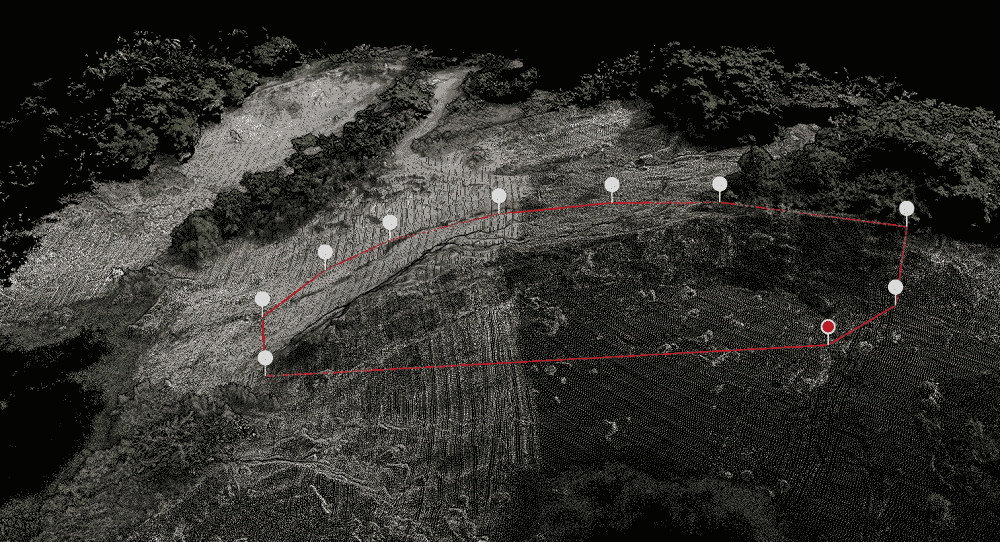
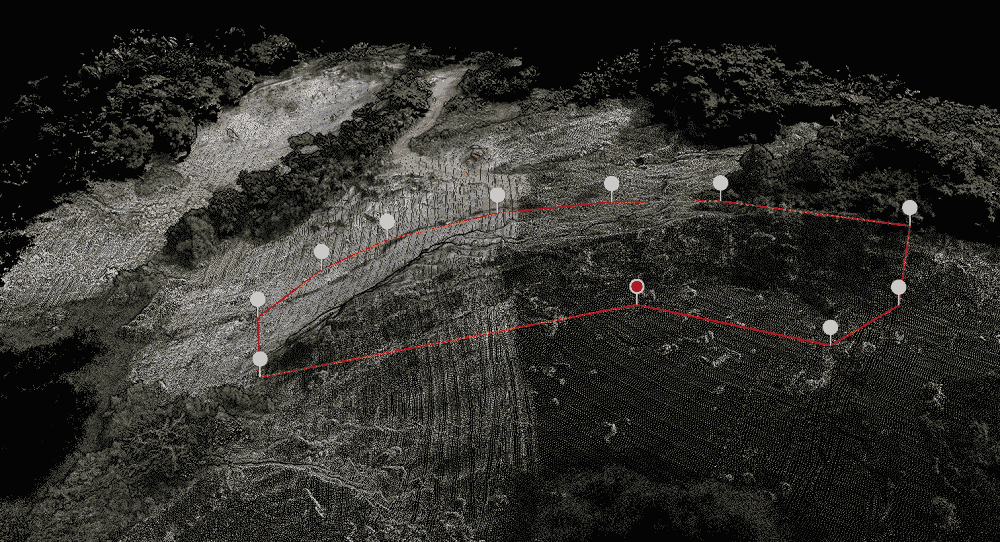
Processing volume
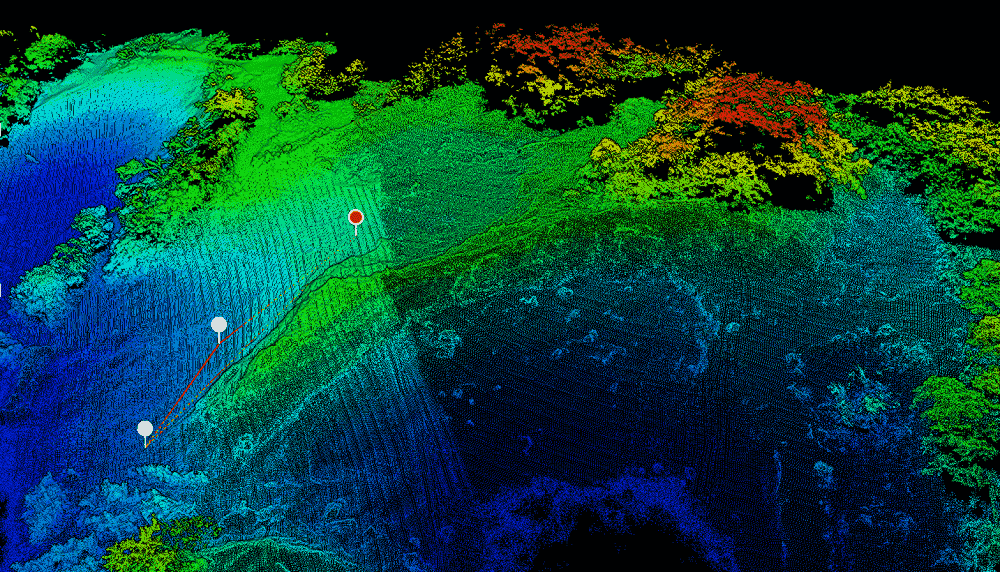
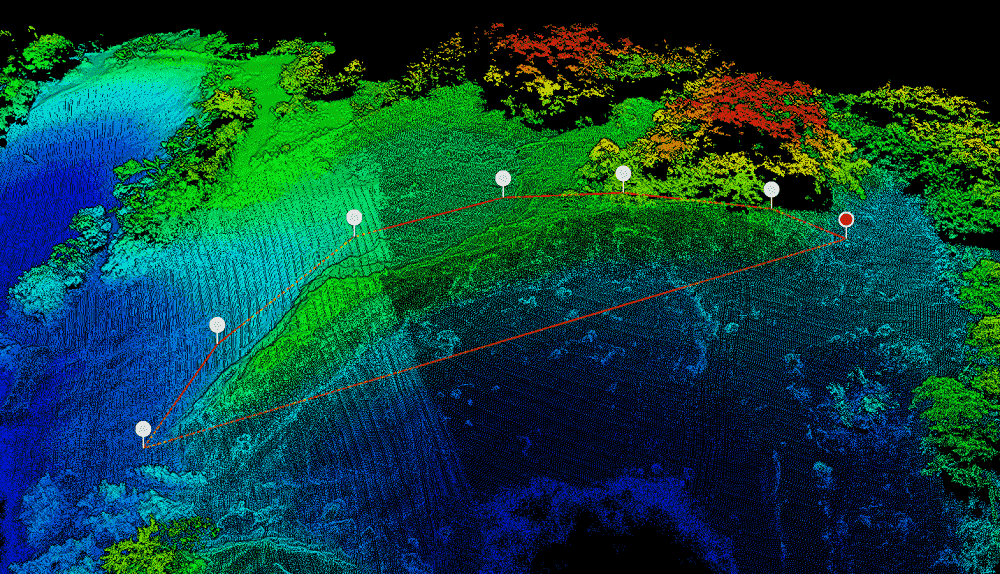
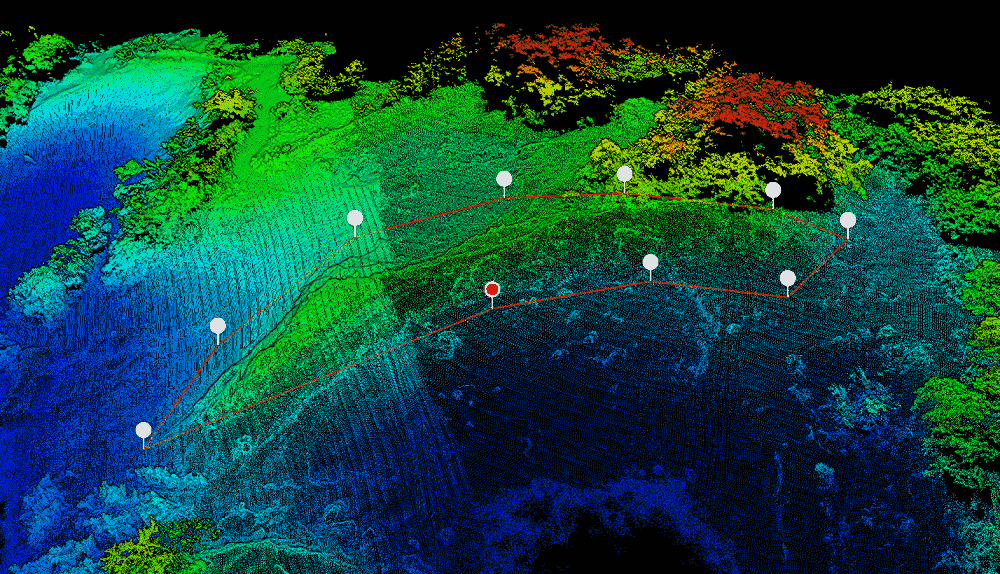
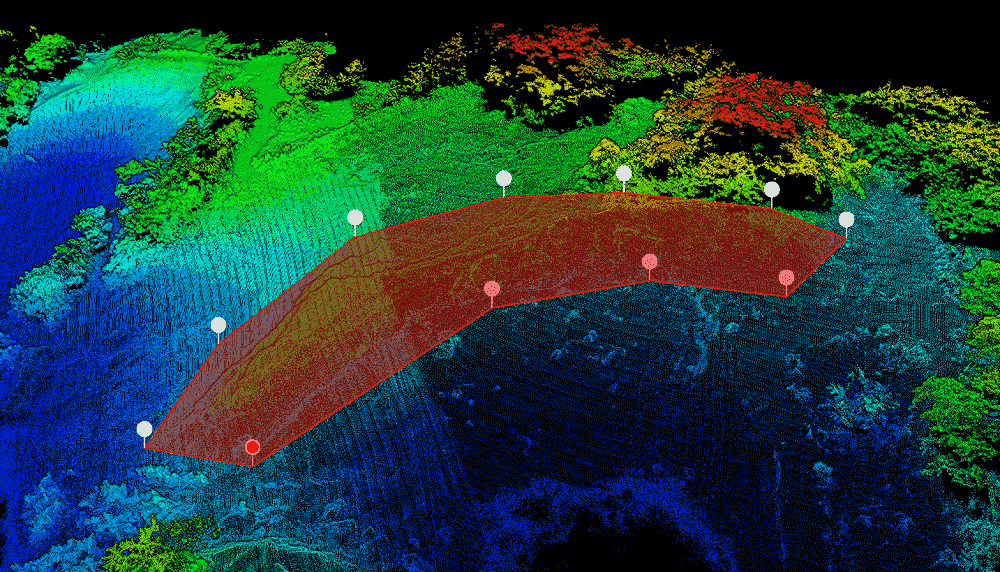
Cut volume: 20883.09 m3
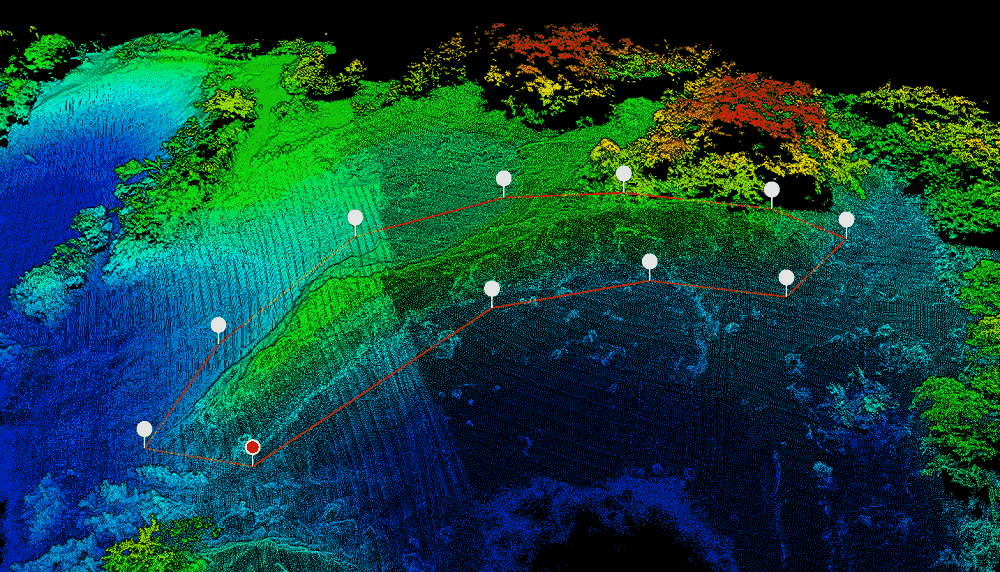
Processing volume


