
Analog amplitude, frequency and phase modulation and demodulation with spectrum analysis
Amplitude Modulation (AM) and Demodulation
Theory :
Amplitude modulation (AM) is the process in which the amplitude of a carrier wave, denoted as \( c(t) = \cos(2\pi f_c t) \), is varied in proportion to the message signal \( m(t) \). Mathematically, this is expressed as:
\( s(t) = A_c \left[ 1 + K_a m(t) \right] \cos(2\pi f_c t) \)
or equivalently:
\( s(t) = A_c \cos(2\pi f_c t) + A_c K_a m(t) \cos(2\pi f_c t) \)
where:
- \( A_c \) = carrier amplitude
- \( f_c \) = carrier frequency
- \( m(t) \) = message (modulating) signal
- \( K_a \) = amplitude sensitivity of the modulator
- \( s(t) \) = amplitude-modulated signal
Block Diagram for Amplitude Modulation
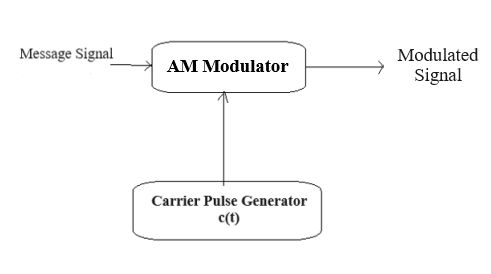
Fig 1: Amplitude Modulation
Modulation Index (\( \mu \))
The modulation index \( \mu \) quantifies how much the carrier amplitude varies in response to the message signal. It is defined as:
\( \mu = A_m / A_c \) or \( \mu = K_a A_m \), where:
- \( A_m \) = peak amplitude of the message signal \( m(t) \)
- \( A_c \) = carrier amplitude
- \( K_a \) = amplitude sensitivity
The modulation index determines modulation quality:
- \( \mu < 1 \): Under-modulation
- \( \mu = 1 \): 100% modulation (ideal)
- \( \mu > 1 \): Over-modulation (causes distortion)
Alternative definition: If \( K_a \) and \( A_m \) are unknown, \( \mu \) can be calculated from the modulated waveform:
\( \mu = \frac{A_{\text{max}} - A_{\text{min}}}{A_{\text{max}} + A_{\text{min}}} \)
- \( A_{\text{max}} \) = maximum amplitude of the modulated signal
- \( A_{\text{min}} \) = minimum amplitude of the modulated signal
Frequency Domain Description
The frequency-domain representation of an AM signal is obtained by applying the Fourier transform to \( s(t) \):
\( s(t) = A_c \left[ 1 + K_a m(t) \right] \cos(\omega_c t) \)
Applying Fourier transform and frequency-shifting properties:
\( S(j\omega) = \pi A_c [ \delta(\omega - \omega_c) + \delta(\omega + \omega_c) ] + \frac{1}{2} K_a A_c [ M(j(\omega - \omega_c)) + M(j(\omega + \omega_c)) ] \)
This spectrum consists of two impulses at ±\( \omega_c \) with amplitude \( \pi A_c \), plus two replicas of the message spectrum shifted to ±\( \omega_c \) and scaled by \( \frac{1}{2} K_a A_c \).
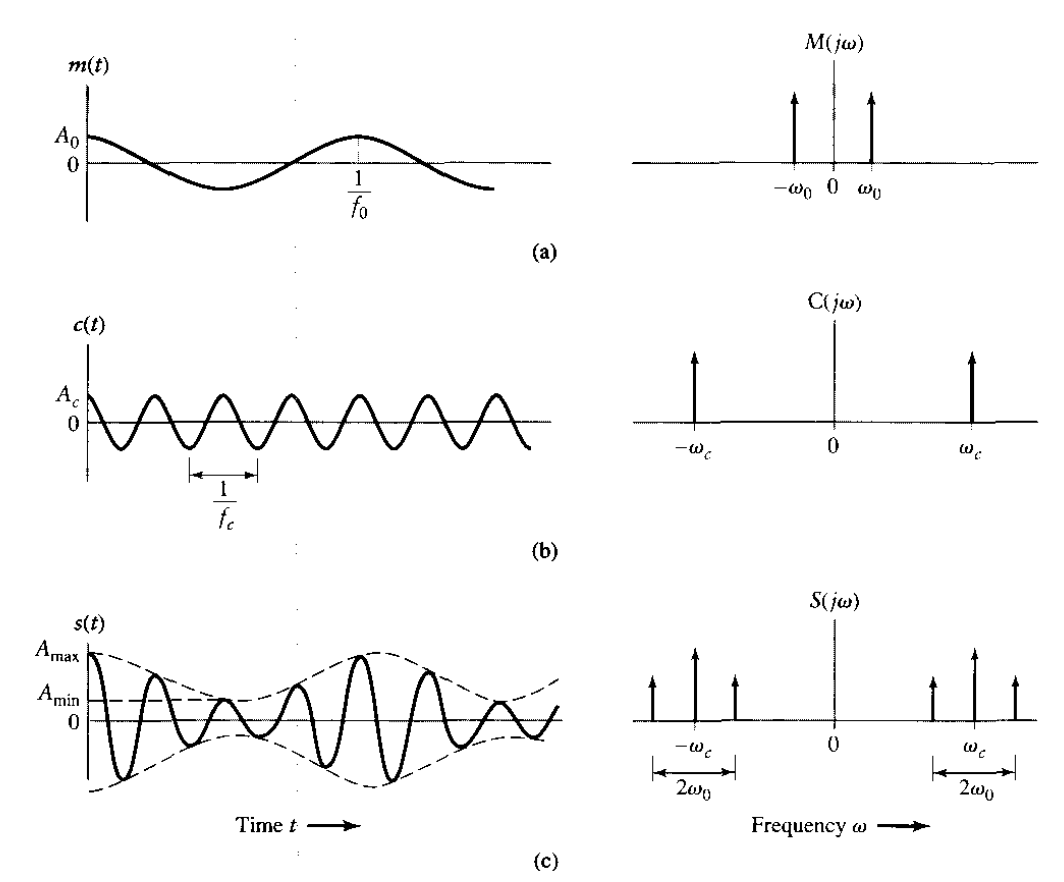
Fig 2: Time-domain (left) and frequency-domain (right) representation of AM with a sinusoidal message.
Bandwidth
The bandwidth of an AM signal is twice the highest frequency component of the message signal \( m(t) \):
BW = 2 * f_m
where \( f_m \) is the maximum frequency in the message signal.
Amplitude Demodulation
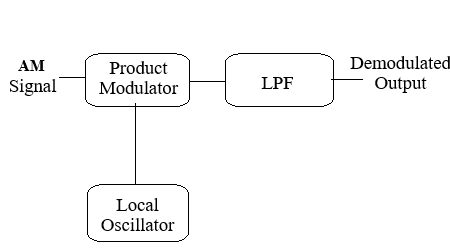
Fig 3: Amplitude Demodulation
Synchronous (coherent) demodulation recovers the original message signal. The AM input is:
\( s(t) = A_c \left[ 1 + K_a m(t) \right] \cos(2\pi f_c t) \)
- \( A_c \): carrier amplitude
- \( f_c \): carrier frequency
- \( m(t) \): message signal
- \( K_a \): amplitude sensitivity
Product Modulator (Multiplier)
Multiply \( s(t) \) with a locally generated carrier \( c(t) = \cos(2\pi f_c t) \):
\( v(t) = s(t) \cdot c(t) = A_c [1 + K_a m(t)] \cos^2(2\pi f_c t) \)
Using \( \cos^2\theta = \frac{1}{2}(1 + \cos2\theta) \):
\( v(t) = \frac{A_c}{2} [1 + K_a m(t)] + \frac{A_c}{2} [1 + K_a m(t)] \cos(4\pi f_c t) \)
The first term is the desired low-frequency component; the second term is a high-frequency component at \( 2f_c \).
Low-Pass Filter (LPF)
The LPF removes the high-frequency component while preserving the low-frequency message. The output is:
\( v_{LPF}(t) = \frac{A_c}{2} + \frac{A_c K_a}{2} m(t) \)
After DC removal and optional amplification, the original message signal \( m(t) \) is recovered.