Virtual Labs
IIT Kharagpur
Simulation
Virtual Labs
IIT Kharagpur
Simulation
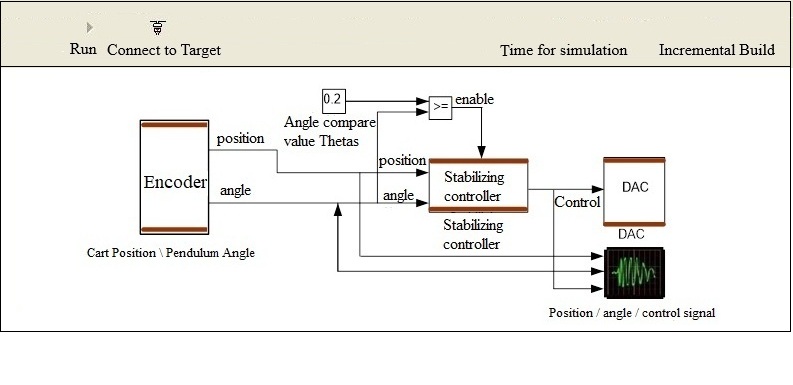
The gain value kd2 must be a positive integer, not zero or negative.
For the provided kd2 gain value, the cart-pendulum system moves beyond the track length, hence the balancing of the pendulum fails. Change the kd2 gain value.








| Sl No. | Initial Angle (°) | kd2 | kd1 | ki2 | ISE |
|---|