Virtual Labs
IIT Kharagpur
Simulation
Virtual Labs
IIT Kharagpur
Simulation

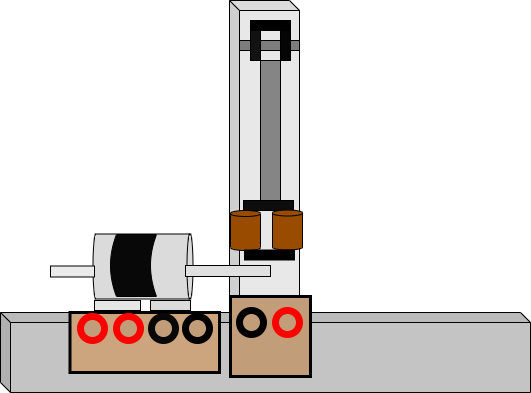 Speed (rpm) :
Speed (rpm) :



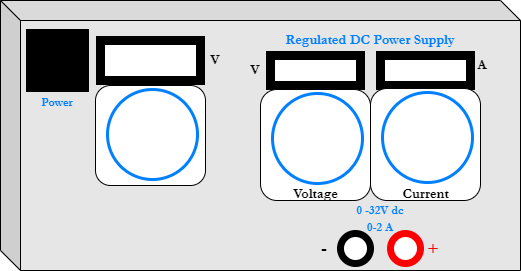
 Control phase voltage (V) :
Control phase voltage (V) :
 13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
| Ec = V | ||||
|---|---|---|---|---|
| Sl No. | Weight(g) | Speed(rpm) | Speed(rad/s) | Torque |
| Ec = V | ||||
|---|---|---|---|---|
| Sl No. | Weight(g) | Speed(rpm) | Speed(rad/s) | Torque |
| Ec = V | ||||
|---|---|---|---|---|
| Sl No. | Weight(g) | Speed(rpm) | Speed(rad/s) | Torque |